A.1 sigma-series ac servopack gain adjustment, A.1 σ -series ac servopack gain adjustment – Yaskawa SGDB User Manual
Page 548
SERVO ADJUSTMENT
A.1.1 Σ -Series AC SERVOPACKs and Gain Adjustment Methods
540
A.1 Σ-Series AC SERVOPACK Gain Adjustment
This section gives some basic information required to adjust the servo system.
A.1.1 Σ-Series AC SERVOPACKs and Gain Adjustment Methods
Five types of Σ-Series AC SERVOPACK are available: SGD, SGDA, DR1, DR2, and the
current SGDB.
The adjustment method is basically identical for each SERVOPACK type, except that
auto-tuning is not available for some types.
The SGDB, SGDA, SGD, and DR2 SERVOPACKs allow both manual adjustment by the
conventional method of observing the machine response and automatic adjustment us-
ing the internal auto-tuning function. The DR1 SERVOPACK does not offer auto-tuning.
The main parameters changed by the customer to adjust the servo system include the
following:
• Cn-04 (Speed Loop Gain)
• Cn-05 (Speed Loop Integration Time Constant)
• Cn-17 (Torque Reference Filter Time Constant)
• Cn-1A (Position Loop Gain)
In a speed-control SERVOPACK (where speed references are applied as analog volt-
ages), the position loop is controlled by the host controller, so the position loop gain is
normally adjusted at the host controller.
If adjustment is not possible at the host controller, the same adjustment can be achieved
using Cn-03 (Speed Reference Gain), but the servomotor may not reach maximum
speed for some preset values of this parameter.
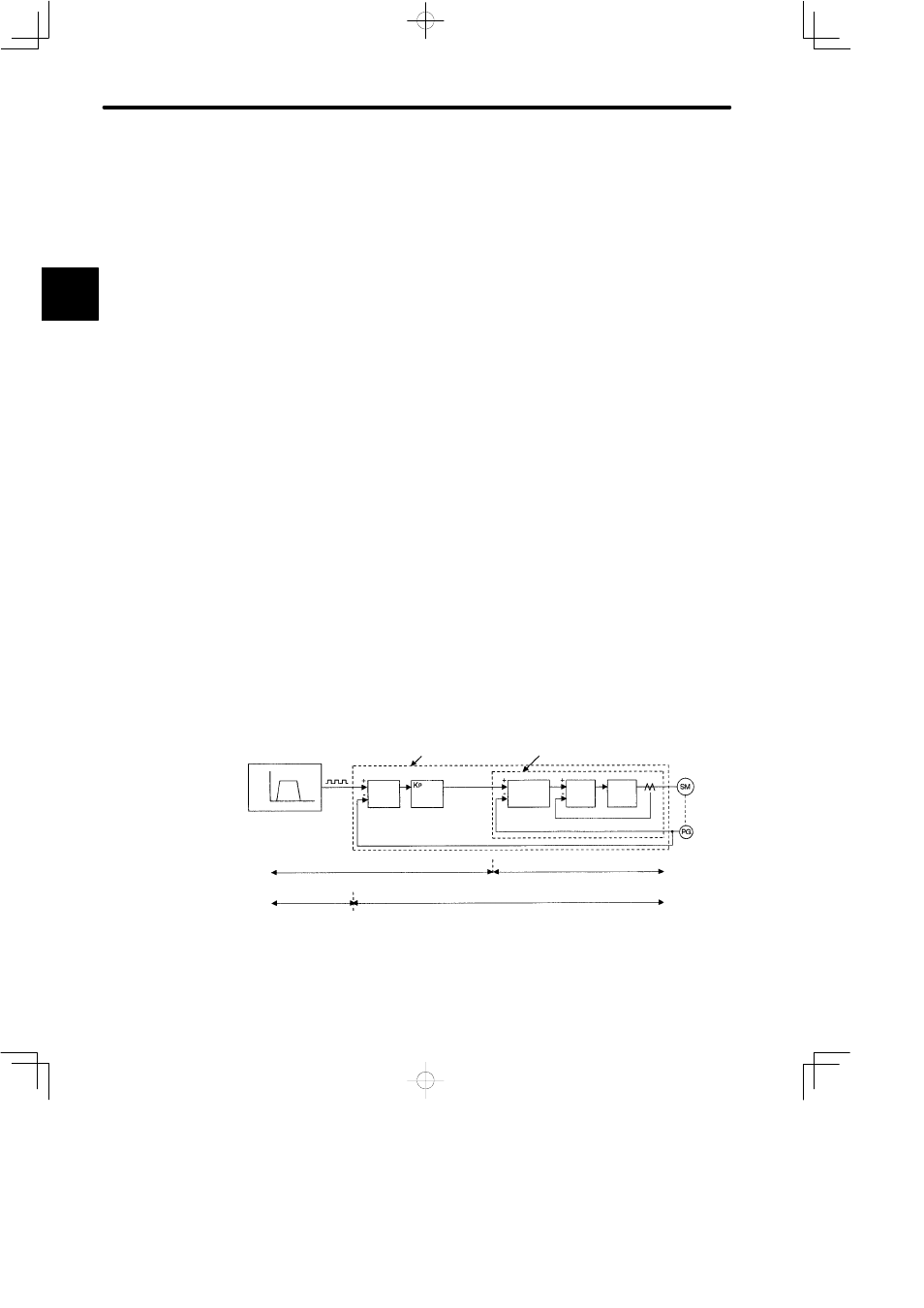
A simple block diagram of the servo system is shown below.
Servo System Block Diagram
Speed Speed
Pattern
Time
Pulse
Train
Position-control SERVO-
PACK
Speed-control SERVO-
PACK
Error
Count-
er
Position Control Loop
(D/A
Convert-
er)
Analog Voltage
Speed Control Loop
Speed Kv
Control
Section Ti
Current
Control
Section
Power
Con-
verter
Motor
Encoder
Using Speed-control
SERVOPACK
Host Controller (supplied by customer)
SERVO-
PACK
Using Position-control
SERVOPACK
Host Controller
(supplied by
customer)
SERVO-
PACK
Kp: Position Loop Gain
Kv: Speed Loop Gain
Ti: Integration Time Constant
Note:
A position-control SERVOPACK has no D/A converter for speed refer-
ence output. This conversion is handled by internal calculations.
A