Yaskawa SGDB User Manual
Page 400
USING THE DIGITAL OPERATOR
5.4.1 Servomotor Dimensional Drawings cont.
390
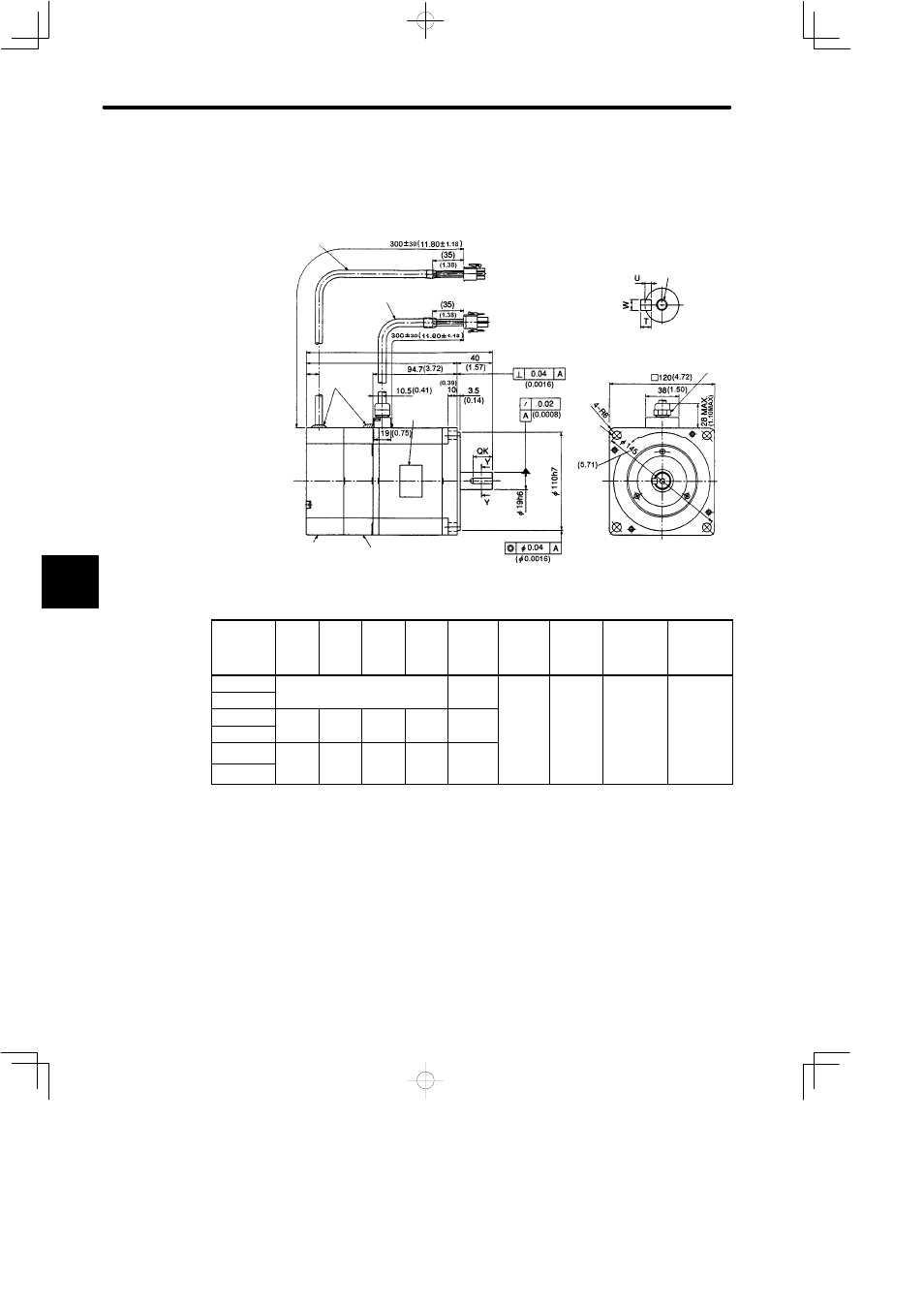
SGMP Servomotor
Absolute Encoder with brake (SGMP-15AWjjB,C Servomotor)
• 1.5kW
Nameplate
Absolute
encoder
2048 P/R
Screw
Cross-section Y-Y
Encoder Lead
UL2854, ø8(ø0.31))
Motor Lead
UL2464, Φ9.5(0.37)
Sealant
Hex.nut
17(0.67)
Holding Brake (deenergized operation)
Voltage:Tail code B:90 VDC C:24 VDC
Brake holding torque=motor rated torque
4-ø10
MTG Holes
14 (0.55)
(208 MAX.) (8.19 MAX)
168 MAX. (6.61 MAX)
in mm (inches)
Type
SGMP-
QK
U
W
T
Screw
Dimen
sions
Output
W (HP)
Approx.
mass
kg (lb)
Allowable
radial
load
N (lb)
Allowable
thrust
load
N (lb)
15AW12B No key
No
S
1500
(
)
8.6
(
)
490 (110)
147 (33)
15AW12C
y
Screw
(2.02)
(18.95)
(
)
( )
15AW14B 22
(
)
3.5
(
)
6
(
)
6
(
)
No
S
15AW14C (0.87) (0.14) (0.24) (0.24) Screw
15AW16B 22
(0 87)
3.5
(0 14)
6
(0 24)
6
(0 24)
M6,
depth
15AW16C
(0.87) (0.14) (0.24) (0.24) depth
10
Note
1) The detector uses a 12-bit absolute encoder 1024 P/R.
2) Type “A” indicates 200 V specification.
3) “15AW14B(C)” and “15AW16B(C)” have a keyed shaft. The keyway complies with JIS B
1301-1976 (precision). A straight key is supplied.
4) The quoted allowable radial load is the value at a position 35 mm (1.40 in.) from the mo-
tor mounting surface.
5