Yaskawa SGDB User Manual
Page 171
3.8 Special Wiring
159
• Incremental Pulse and Home Position
Pulse:
Initial incremental pulses which pro-
vide absolute data are first divided by
the frequency divider inside the SER-
VOPACK and then output in the same
way as normal incremental pulses.
• Use the following parameter to set the pulse dividing ratio.
Cn-0A
PGRAT
Dividing Ratio
Setting
Unit: P/R
Setting Range:
16 to Number
of Encoder
Pulses
For Speed/Torque
Control and
Position Control
Set the number of output pulses for PG output
signals (PAO, /PAO, PBO and /PBO).
Pulses from motor encoder (PG) are divided
by the preset number of pulses before being
output.
The number of output pulses per revolution is
set in this parameter. Set this value according
to the reference unit of the machine or control-
ler to be used.
The setting range varies according to the en-
coder used.
3
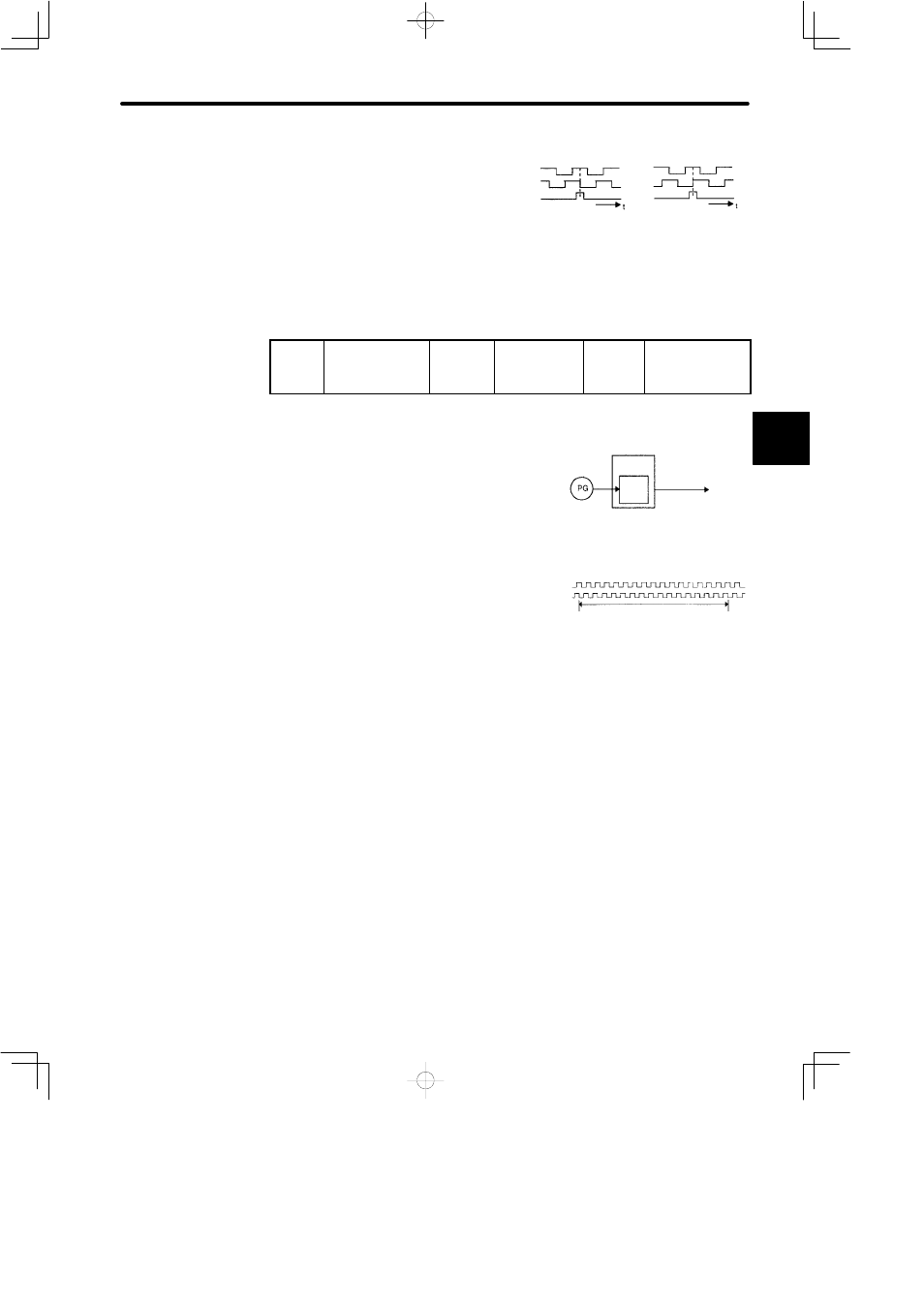
Phase A
Phase B
Phase C
Forward
rotation
Reverse
rotation
• Note that phase C is not divided so its pulse
width is narrower than phase A.
Phase A
Phase B
Phase C
SGMj
servomotor
encoder
SGDB
SERVOPACK
Output terminals:
PAO (1CN-33)
/PAO (1CN-34)
PBO (1CN-35)
/PBO (1CN-36)
Setting example:
Preset value: 16
1 revolution
Phase A
Phase A
Phase B
Phase B
Output
Fre-
quency
divider
PA0
PB0