Yaskawa SGDB User Manual
Page 70
APPLICATIONS OF Σ-SERIES PRODUCTS
3.1.2 Setting the Overtravel Limit Function
58
Cn-06
EMGTRQ
Emergency Stop
Torque
Unit:
%
Setting
Range: 0 to
Maximum
Torque
Factory
Setting:
Maximum
Torque
Valid when Cn-01 bit 8
= 1
Specifies the stop torque to be applied at overtra-
vel when the input signal for prohibiting forward or
reverse rotation is to be used.
Specifies a torque value in terms of a percentage
of the rated torque.
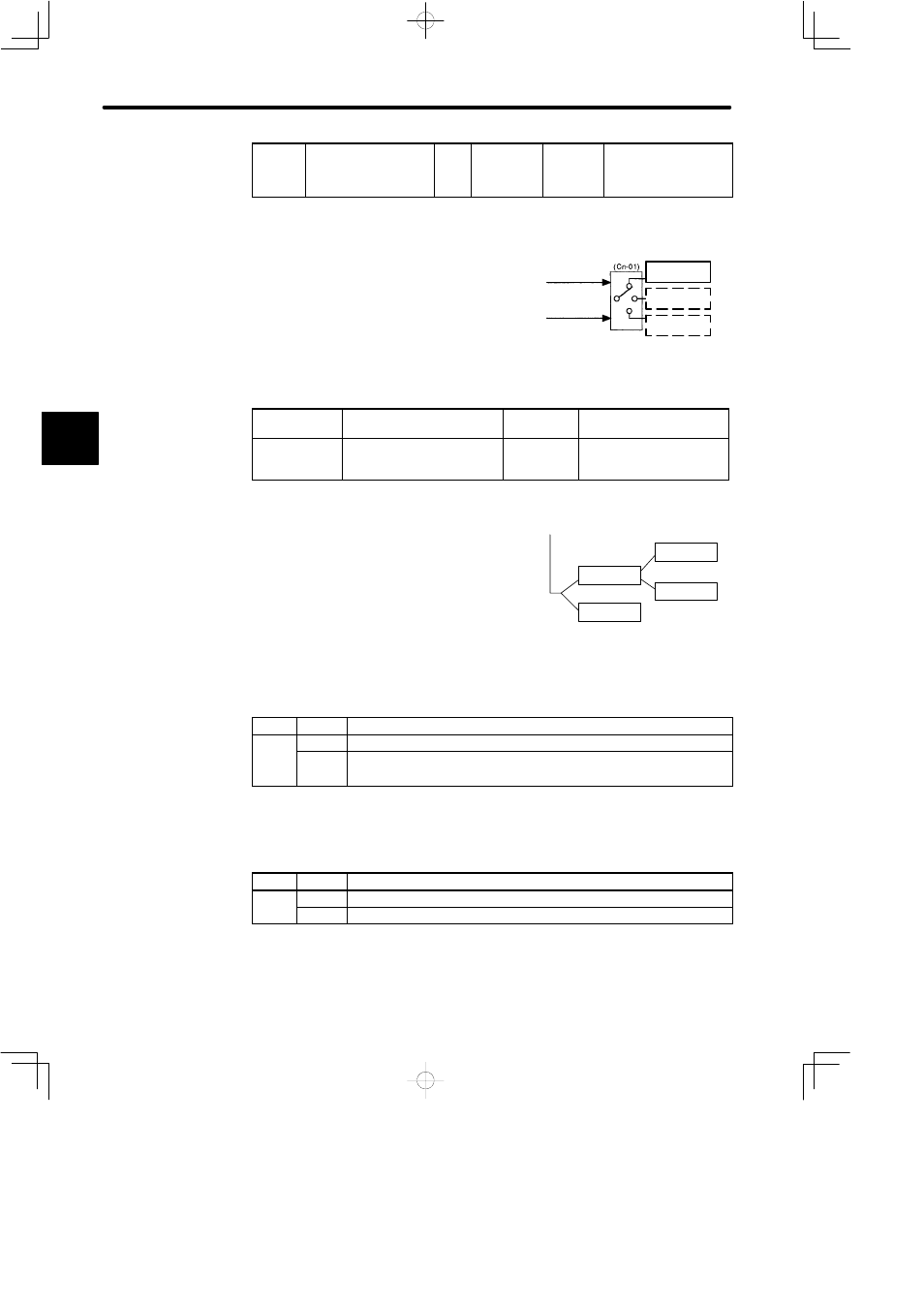
Cn-01 Bit 6
How to Stop Motor at Servo
OFF
Factory
Setting: 0
Cn-01 Bit 7
Operation to Be Performed
when Motor Stops after Servo
OFF
Factory
Setting: 1
Invalid for 2.0 kW or more
The SERVOPACK enters servo OFF status when:
• Servo ON input signal (/S-ON, 1CN-40) is
turned OFF.
• Servo alarm arises.
• Power is turned OFF.
Specify how to stop the motor when one of the
above events occurs during operation.
Setting
Meaning
C 01
0
Stops the motor by dynamic brake.
Cn-01
bit 6
1
Causes the motor to coast to a stop.
The motor power is OFF and stops due to machine friction.
If dynamic brake stop mode is selected, specify the operation to be performed when the
motor stops.
Setting
Meaning
Cn-01
0
Releases dynamic brake after the motor stops.
Cn-01
bit 7
1
Does not release dynamic brake even after the motor stops.
Note
For SERVOPACKs of 2.0 kW or more, bit 7 of Cn-01 can be set to 0 only.
3
Input signal for
prohibiting
forward rotation
P-OT (1CN-42)
Memory
switch
Input signal for
prohibiting reverse
rotation
N-OT (1CN-43)
Emergency
stop torque
Stop by
dynamic brake
Coasting to a
stop
Stop mode
After stop
Bit 6
0
1
Coasting to a
stop
Servo OFF
Releasing
dynamic brake
Stop by
dynamic brake
Holding
dynamic brake
0
1
Bit 7
Dynamic brake is a function that
electrically applies brakes by using a
resistor to consume motor rotation
energy.