Input /p-cl 1cn-45, Input /n-cl 1cn-46 – Yaskawa SGDB User Manual
Page 97
3.2 Setting Parameters According to Host Controller
85
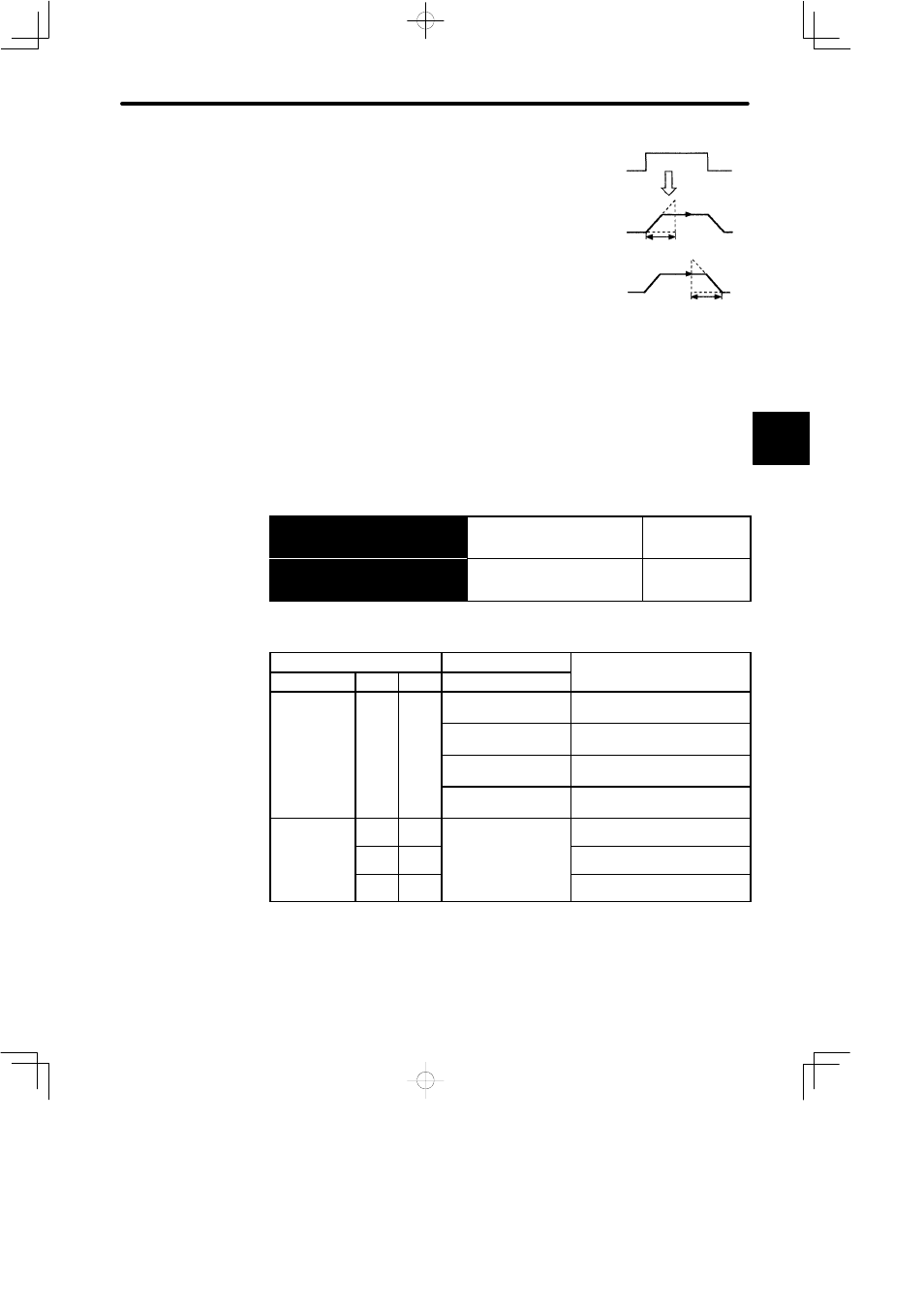
In the SERVOPACK, a speed reference is mul-
tiplied by the preset acceleration or decelera-
tion value to provide speed control.
When a progressive speed reference is input
or contact input speed control is used, smooth
speed control can be performed. (For normal
speed control, set “0” in each parameter.)
Set the following value in each parameter.
• Cn-07: Time interval from the time the motor starts until it reaches the maximum
speed
• Cn-23: Time interval from the time the motor is running at the maximum speed until it
stops
J
Operating by Contact Input Speed Control Function
Contact input speed control performs the following operation.
The following input signals are used to start and stop the motor.
→ Input /P-CL 1CN-45
Speed Selection 1 (Forward
External Torque Limit Input)
For Speed/Torque
Control and
Position Control
→ Input /N-CL 1CN-46
Speed Selection 2 (Reverse
External Torque Limit Input)
For Speed/Torque
Control and
Position Control
When Contact Input Speed Control is used:
Contact Signal
Parameter
Selected Speed
/P-CON
/P-CL /N-CL
Cn-2B
Selected Speed
3
Stopped by internal speed refer-
ence 0
0
0
4
Analog speed reference input
(V-REF)
−−−−
0
0
5
Pulse reference input (position
control)
6
Analog torque reference input
(torque control)
Direction of
rotation
0
1
SPEED 1 (Cn-1F)
rotation
0: Forward
rotation
1
1
Common to 3, 4, 5 and
6
SPEED 2 (Cn-20)
1: Reverse
rotation
1
0
6
SPEED 3 (Cn-21)
−−−−: Not used
Modes Other Than Contact Input Speed Control
Input signals are used as external torque limit input.
3
Speed
reference
Soft start
SERVOPACK
contact input
speed
reference
Cn-07: Set this time interval.
Cn-23: Set this time interval.
Maximum
speed
Maximum
speed