L7: torque limit, Setting torque limits, Common_tmo – Yaskawa L1000E AC Drive Technical Manual for CIMR-LE Models for Elevator Applications User Manual
Page 224: 8 l: protection functions
5.8 L: Protection Functions
224
YASKAWA ELECTRIC SIEP YAIL1E 01A YASKAWA AC Drive L1000E Technical Manual
Setting 6: UL3, UL4 at run (Alarm)
Undertorque detection works as long as the Up/Down command is active. The operation continues after detection and an
oL3 or oL4 alarm is triggered.
Setting 7: UL3, UL4 at speed agree (Fault)
Undertorque detection is active only when the output speed is equal to the speed reference, i.e., no detection during
acceleration and deceleration. The operation is stopped and an oL3 or oL4 fault is triggered.
Setting 8: UL3, UL4 at run (Fault)
Undertorque detection works as long as a Up/Down command is active. Operation stops and an oL3 or oL4 fault is
triggered.
■
L6-02, L6-05: Torque Detection Level 1, 2
These parameters set the detection levels for the torque detection functions 1 and 2. In V/f control mode, these levels are
set as a percentage of the drive rated output current, while in vector control modes these levels are set as a percentage of
the motor rated torque.
■
L6-03, L6-06: Torque Detection Time 1, 2
These parameters determine the time required to trigger an alarm or fault after exceeding the levels in L6-02 and L6-05.
◆ L7: Torque Limit
The torque limit function can be used to limit the torque in each of the four quadrants individually and thereby protect the
elevator. It can be used in OLV, CLV, and CLV/PM control modes. The limit can be set by parameters. A digital output
programmed for “During torque limit” (H2-01 through H2-05 = 30) will be switched when the drive is operating at the
torque limit.
■
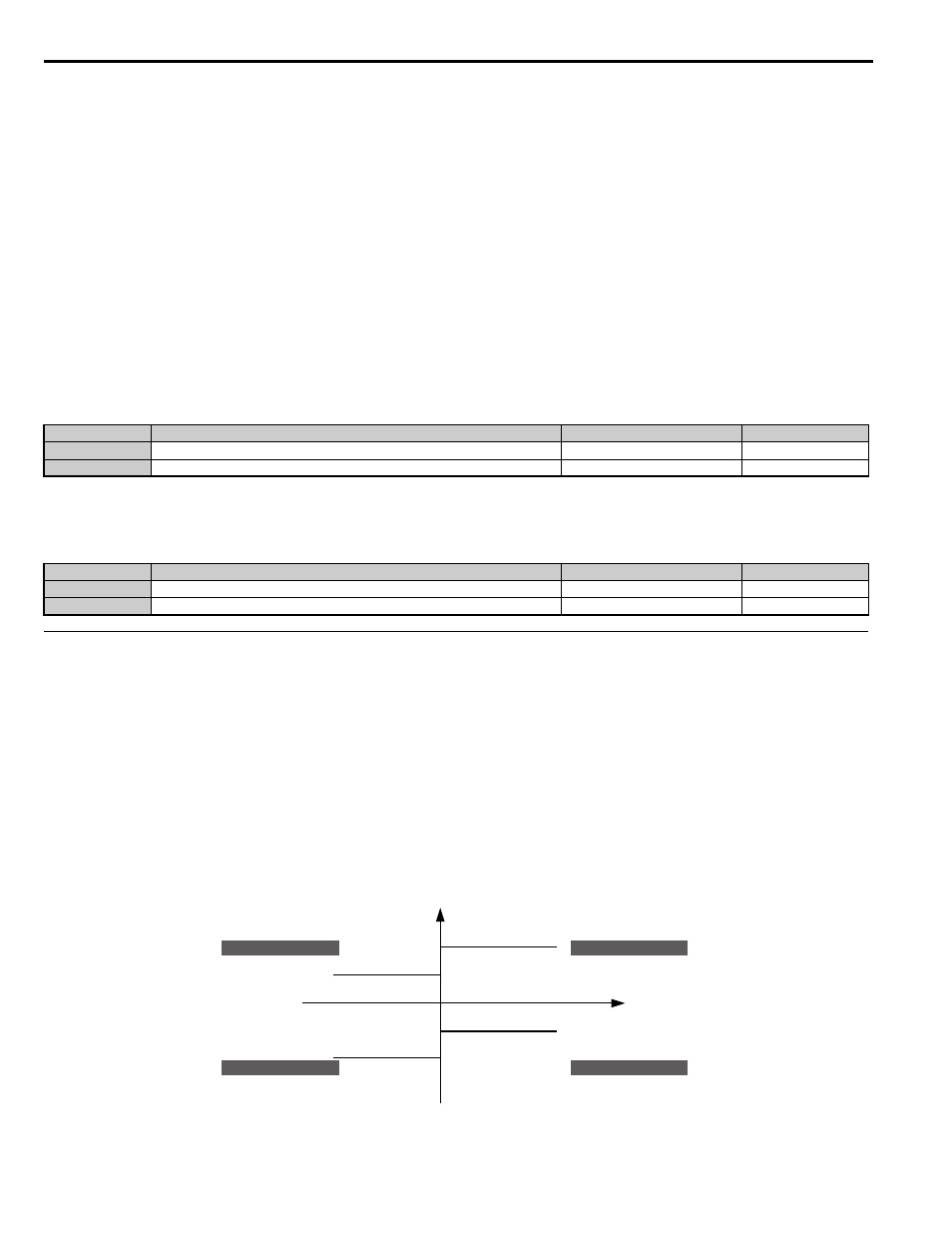
Setting Torque Limits
The torque limits are defined by parameters L7-01 to L7-04 for each of the four operation quadrants.
shows
which of the limit settings is applied in each quadrant.
Note: The maximum output torque is ultimately limited by the drive output current. Output torque will not exceed the limit set for the
drive rated current, even if the torque limits are set to higher values.
Figure 5.41
Figure 5.41 Torque Limit Parameters
No.
Parameter Name
Setting Range
Default
L6-02
Torque Detection Level 1
0 to 300%
150%
L6-05
Torque Detection Level 2
0 to 300%
150%
No.
Parameter Name
Setting Range
Default
L6-03
Torque Detection Time 1
0.0 to 10.0 s
0.1 s
L6-06
Torque Detection Time 2
0.0 to 10.0 s
0.1 s
positive torque reference
negative torque reference
Parameter L7-04
REV motor rotation
Parameter L7-02
Parameter L7-01
FWD motor rotation
Parameter L7-03
quadrant 2
quadrant 3
quadrant 1
quadrant 4
REV run regenerative
REV run motoring
FWD run motoring
FWD run regenerative
common_TMo