11 s: elevator parameters, Direct landing, Table 5.15 conditions for direct landing – Yaskawa L1000E AC Drive Technical Manual for CIMR-LE Models for Elevator Applications User Manual
Page 260
5.11 S: Elevator Parameters
260
YASKAWA ELECTRIC SIEP YAIL1E 01A YASKAWA AC Drive L1000E Technical Manual
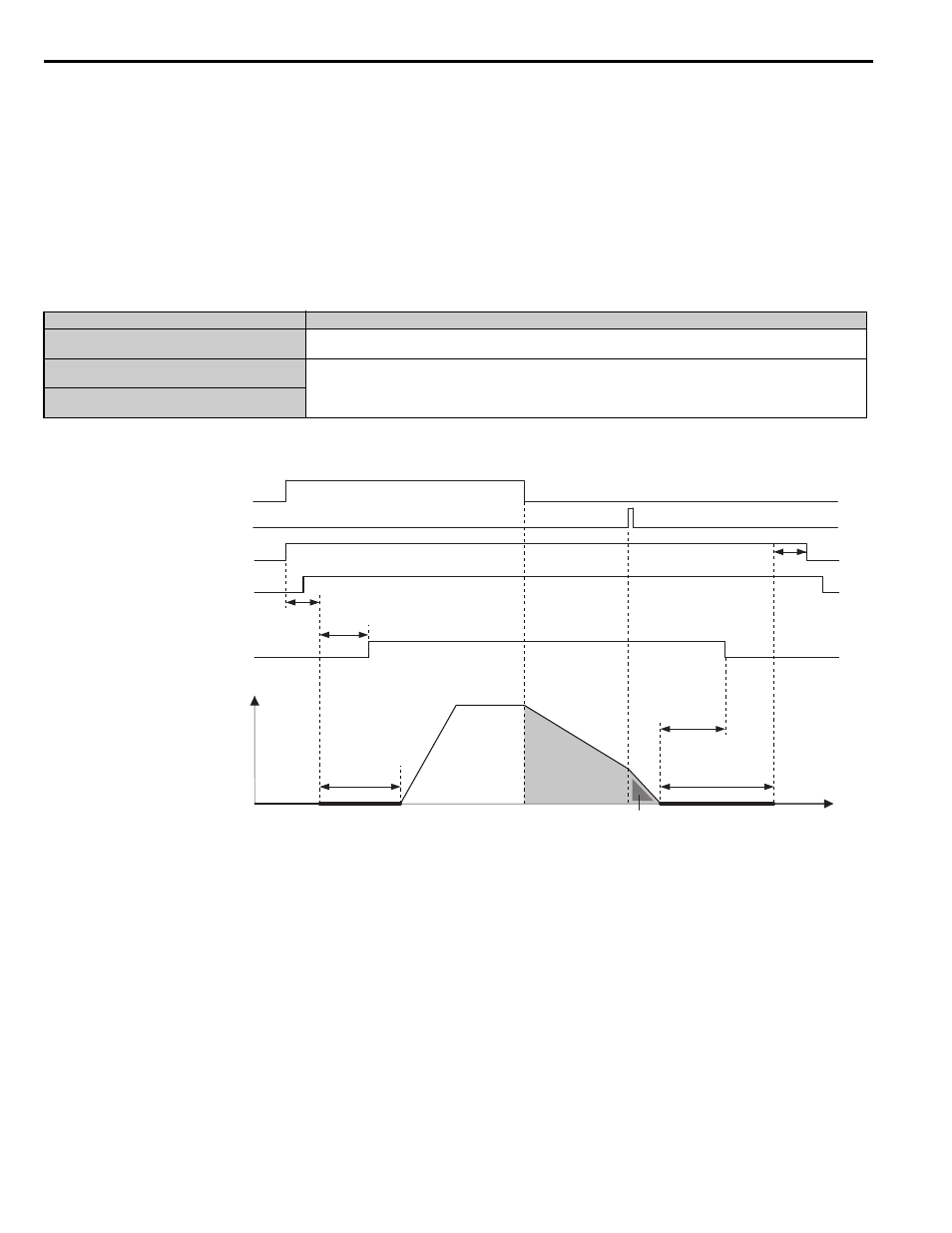
Direct Landing
Direct Landing (S5-10 = 1) is activated at the start of deceleration, and brings the elevator car to the designated floor
without the use of the leveling speed.
Direct Landing disables Leveling Distance Control, and uses a speed reference calculated by multiplying E1-04 times S5-
13. If a Stop distance correction command (H1- = 5C) is triggered during Direct Landing, then the drive will switch
to the stop distance set in S5-12 for the remaining distance. Direct Landing will end once data from the encoder indicates
that the stopping distance is 0.
illustrates a Direct Landing Operation example.
Table 5.15 Conditions for Direct Landing
Figure 5.49 Direct Landing Operation Example
Speed Priority
Direct Landing Start Conditions
Multi-step speed sequence
(d1-18 = 0, 3)
Speed reference
≥ E1-04 × S5-13 and the Up/Down command is not active or the speed reference is 0.
High speed reference has priority
(d1-18 = 1)
The Up/Down command is not active, the speed reference is 0, or the leveling speed reference has been selected by one of the
multi-function input terminals (H1-).
Leveling speed reference has priority
(d1-18 = 2)
<1> Area S1 is the deceleration distance (S5-11) from the start of deceleration to stop. Area S2 is the stopping distance (S5-12) from the point
at which the stopping distance compensation signal is entered to when the car arrives at the designated floor.
Operation
Speed
Time
ON
OFF
OFF
Run Command Delay Time (S1-10)
Brake Release Delay Time
(S1-06)
Brake Close
Delay Time
Output Contactor Open
Delay Time (S1-11)
Zero Speed
at Stop
(S1-07)
Zero Speed
at Start
Run Command
(Forward [Up] / Reverse [Down])
H1-
= 5C
(Stop Distance Correction)
H2-
= 51
(
Output Contactor Control
)
H1-
= 56
(
Motor Contactor Feedback
)
H2-
= 50 (Brake Control
)
ON
ON
ON
OFF
S1
S2
<1>
<1>