N5-01: inertia compensation selection, N5-02: motor acceleration time, Common_tmo – Yaskawa L1000E AC Drive Technical Manual for CIMR-LE Models for Elevator Applications User Manual
Page 233: 9 n: special adjustments, The motor acceleration time can be calculated by, Setting 0: disabled setting 1: enabled, Calculation
5.9 n: Special Adjustments
YASKAWA ELECTRIC SIEP YAIL1E 01A YASKAWA AC Drive L1000E Technical Manual
233
P
a
ra
me
te
r De
ta
ils
5
Note: Prior to using Feed Forward, always perform Auto-Tuning or set the correct motor data manually. Also perform ASR Auto-
Tuning to set the speed loop gain (C5-01, C5-03, C5-13), or adjust it manually. Fine-tune the other speed control loop parameters
(C5-) if required.
Figure 5.43
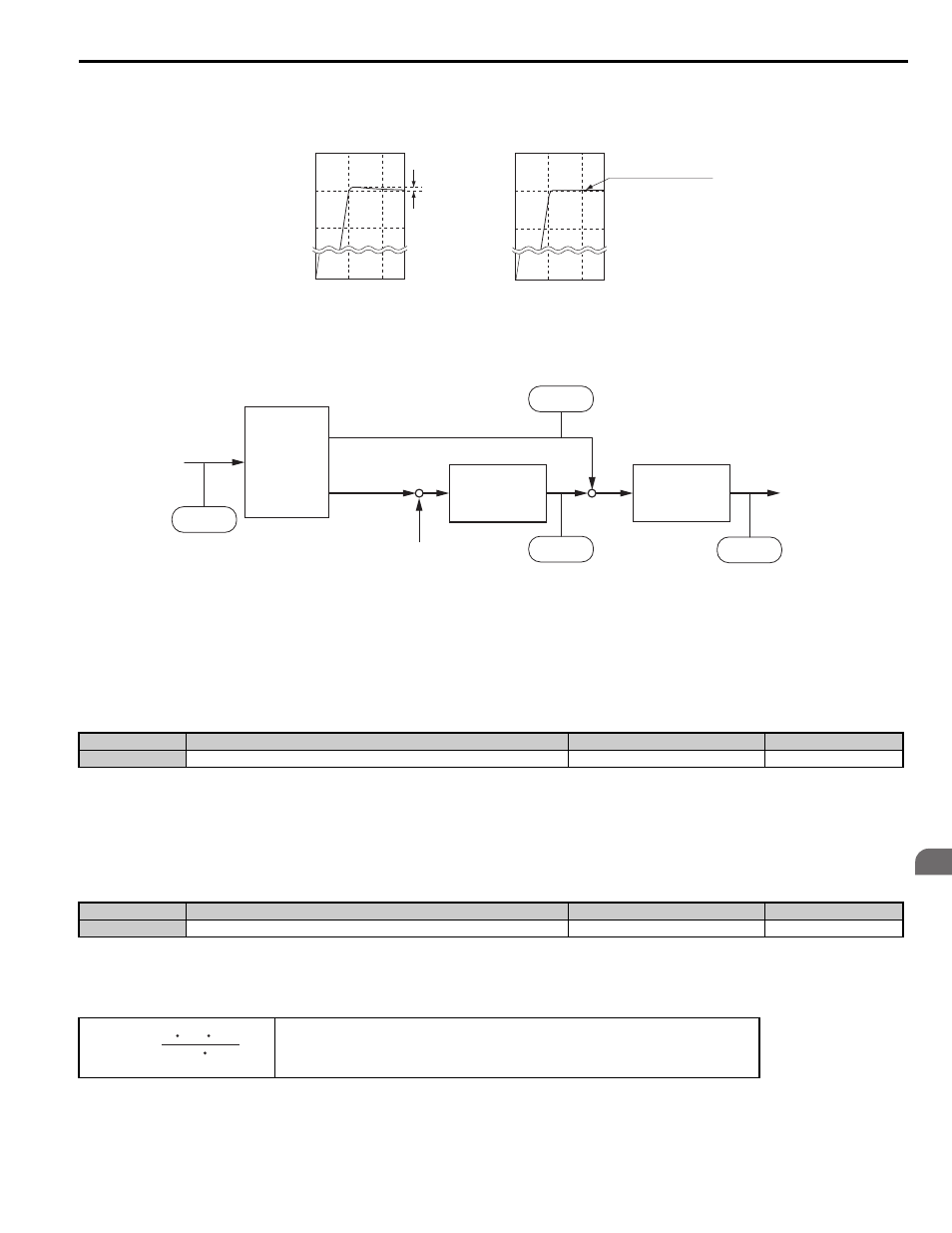
Figure 5.43 Overshoot Suppression by Inertia Compensation
Figure 5.44
Figure 5.44 Inertia Compensation
Note: Prior to using Inertia Compensation, always perform Auto-Tuning or set the correct motor data manually. and adjust the Speed
Control Loop.
■
n5-01: Inertia Compensation Selection
Enables or disables the Inertia Compensation function.
Setting 0: Disabled
Setting 1: Enabled
■
n5-02: Motor Acceleration Time
Sets the time required to accelerate the motor from a full stop up to the rated speed at the rated torque.
Calculation
The motor acceleration time can be calculated by,
No.
Parameter Name
Setting Range
Default
n5-01
Inertia Compensation Selection
0 or 1
0
No.
Parameter Name
Setting Range
Default
n5-02
Motor Acceleration Time
0.001 to 10.000 s
Determined by o2-04
Where:
• J
Motor
is the motor inertia in kgm
2
.
• n
rated
is the rated speed of the motor in r/min
• T
rated
is the rated torque of the motor in N
⋅m.
1050
Overshoot
Conventional Speed Control
Inertia Compensation Control
Time (s)
Motor Speed (r/min)
Motor Speed (r/min)
Time (s)
900
750
0
1050
900
750
0
0
0.5
1
0
0.5
1
Suppresses
overshoot at the
end of acceleration
common_TMo
Speed Control
Loop P and I
C5-01/02/03/04
/13/14
Inertia
Compensation
n5-02/03
Speed
reference after
Soft Starter
Speed Control
Loop Delay and
Torque Limits
C5-06, L7-
+
+
+
-
Speed
Feedback
U6-26
U6-25
U1-01
Inertia Compensation Output
Speed Control Loop Output
U1-09
Speed
Reference
Inertia Compensation Torque
Compensation Value
Torque reference
common_TMo
n5-02 =
π J
Motor
n
rated
30 T
rated