Yaskawa Matrix Converter User Manual
Page 100
Notes on Tuning the MxC
4-
17
Precautions While Tuning the MxC
•
Do not change the Torque Compensation Gain (C4-01) from its default setting of 1.00 when using Open
Loop Vector Control.
•
If speeds are inaccurate during regeneration in Open Loop Vector Control, enable Slip Compensation Dur-
ing Regeneration (C3-04 = 1).
•
Use slip compensation to improve speed control during V/f Control Method (A1-02 = 0).
Set the Motor Rated Current (E2-01), Motor Rated Slip (E2-02), and Motor No-Load Current (E2-03), and
then adjust the Slip Compensation Gain (C3-01) to between 0.5 and 1.5. The default setting for V/f Control
Method is C3-01 = 0.0 (slip compensation disabled).
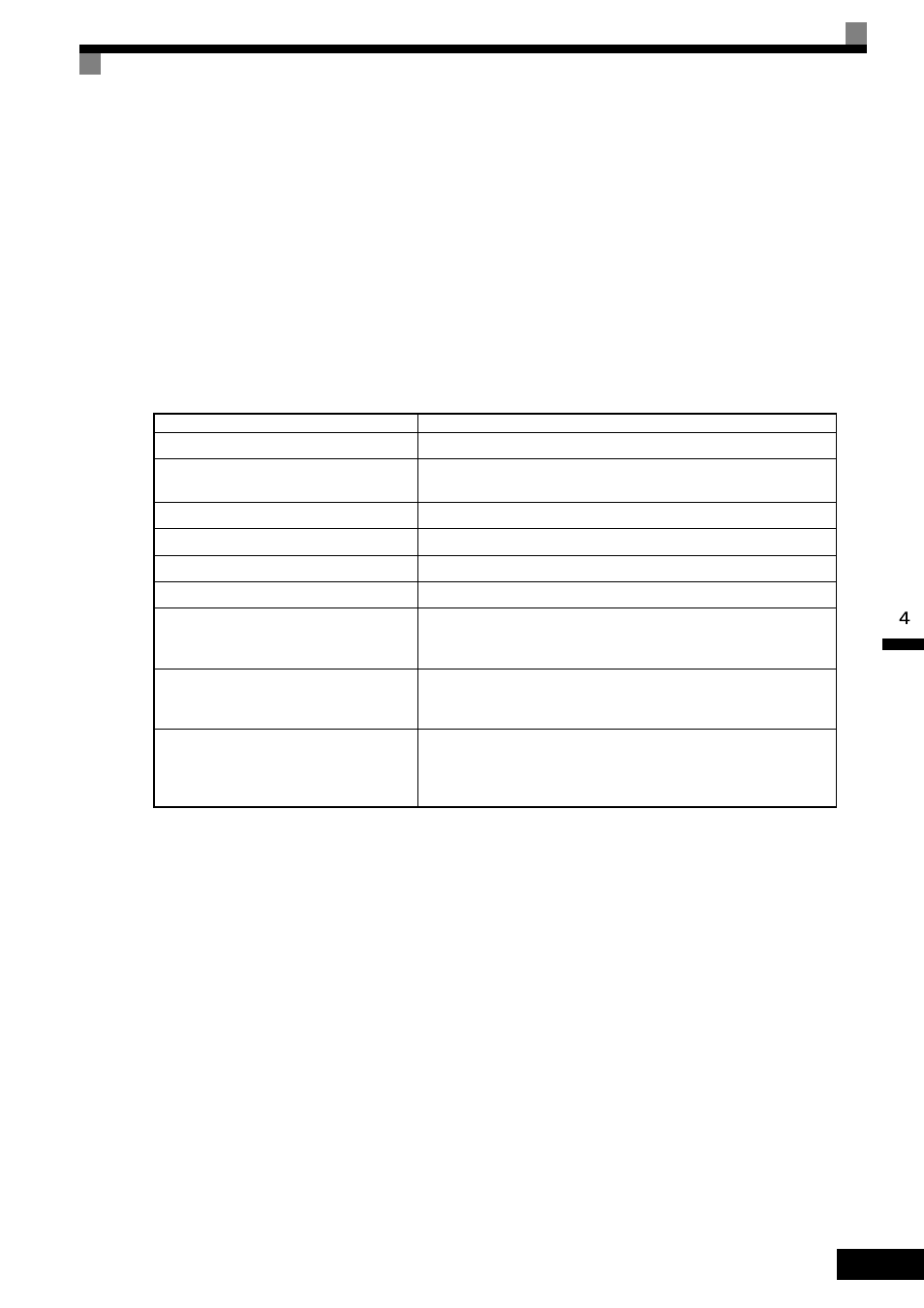
The following parameters will also indirectly affect the control system:
Table 4.4 Parameters Indirectly Affecting Control and Applications
Parameters
Application
Dwell Function (b6-01 to b6-04)
Used for heavy loads or large machine backlashes.
Droop Function (b7-01, b7-02)
Used to soften the torque or to balance the load between two motors. Can
be used when the Control Method Selection (A1-02) is set to 3.
Accel/Decel Times (C1-01 to C1-11)
Adjust torque during acceleration and deceleration.
S-Curve Characteristics (C2-01 to C2-04)
Used to prevent shock when completing acceleration.
Jump Frequencies (d3-01 to d3-04)
Used to avoid resonance points during run.
Analog Input Filter Time Constant (H3-12)
Used to prevent fluctuations in analog input signals caused by noise.
Stall Prevention
(L3-01 to L3-03, L3-05, L3-06)
Used to prevent overvoltage errors and motor stalling for heavy loads or
rapid accel/decel. Stall prevention is enabled by default and the setting
does not normally need to be changed.
Torque Limits
(L7-01 to L7-04, L7-06, L7-07)
Set the maximum torque during vector control. If a setting is increased,
use a motor with higher capacity than the MxC. If a setting is reduced,
stalling can occur under heavy loads.
Feed Forward Control (n5-01 to n5-03)
Used to increase response for accel/decel or to reduce overshooting when
there is low machine rigidity and the gain of the speed controller (ASR)
cannot be increased. The inertia ratio between the load and motor and the
acceleration time of the motor running alone must be set.