Mxc control methods, Control methods and features – Yaskawa Matrix Converter User Manual
Page 372
10
-2
MxC Control Methods
Details of the MxC control methods and their features are provided in this section.
Control Methods and Features
The MxC offers three control methods, allowing the selection of a control method to suit the required purpose.
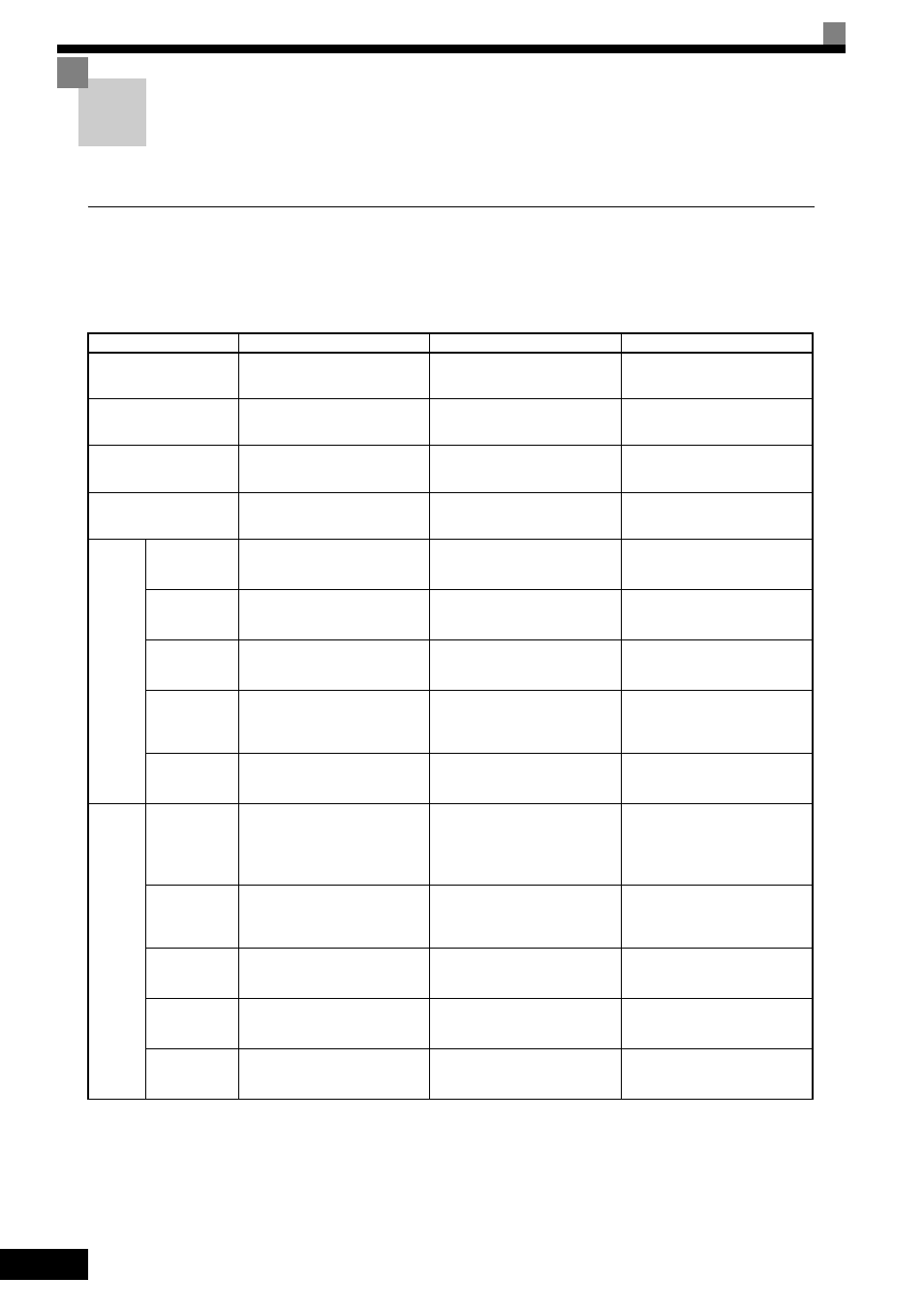
Table 10.1 provides an overview of the control methods and their features.
Table 10.1 Overview of Control Methods and Features
Control Method
V/f Control
Open Loop Vector Control
Flux Vector Control
Parameter Setting
A1-02 = 0
A1-02 = 2
(default)
A1-02 = 3
Basic Control
Voltage/frequency fixed ratio
control
Current vector control without a
PG
Current vector control with a PG
Main Applications
Variable speed control
Variable speed control
High-performance control with
a PG on the motor side
PG Speed Control Card
(Option)
Not required.
Not required.
Required
Basic
Perfor-
mance
Speed Control
Range
*1
1:10
1:10
1:1000
Speed Control
Accuracy
*2
±2 to 3%
±0.2%
±0.05%
Speed
Response
*3
-
5 Hz
30 Hz
Maximum
Output
Frequency
120 Hz
120 Hz
120 Hz
Starting
Torque
*4
150%/6 Hz
150%/6 Hz
150%/0 min
−1
Appli-
cation
Func-
tions
Auto-Tuning
Line-to-line resistance
(normally not required)
Rotational Auto-Tuning, Sta-
tionary Auto-Tuning, Stationary
Auto-Tuning for line-to-line
resistance only
Rotational Auto-Tuning, Sta-
tionary Auto-Tuning, Stationary
Auto-Tuning for line-to-line
resistance only
Torque
Limiting
*5
No
Yes (except during accel/decel,
below minimum frequency, or
during reverse rotation)
Yes
Torque
Control
*6
No
No
Yes
Droop
Control
*7
No
No
Yes (except for 0 min
−1
and dur-
ing reverse rotation)
Zero-Servo
Control
*8
No
No
Yes