Droop control function, Feed forward control structure, Setting precautions – Yaskawa Matrix Converter User Manual
Page 286
Individual Functions
6-
121
Feed Forward Control Structure
•
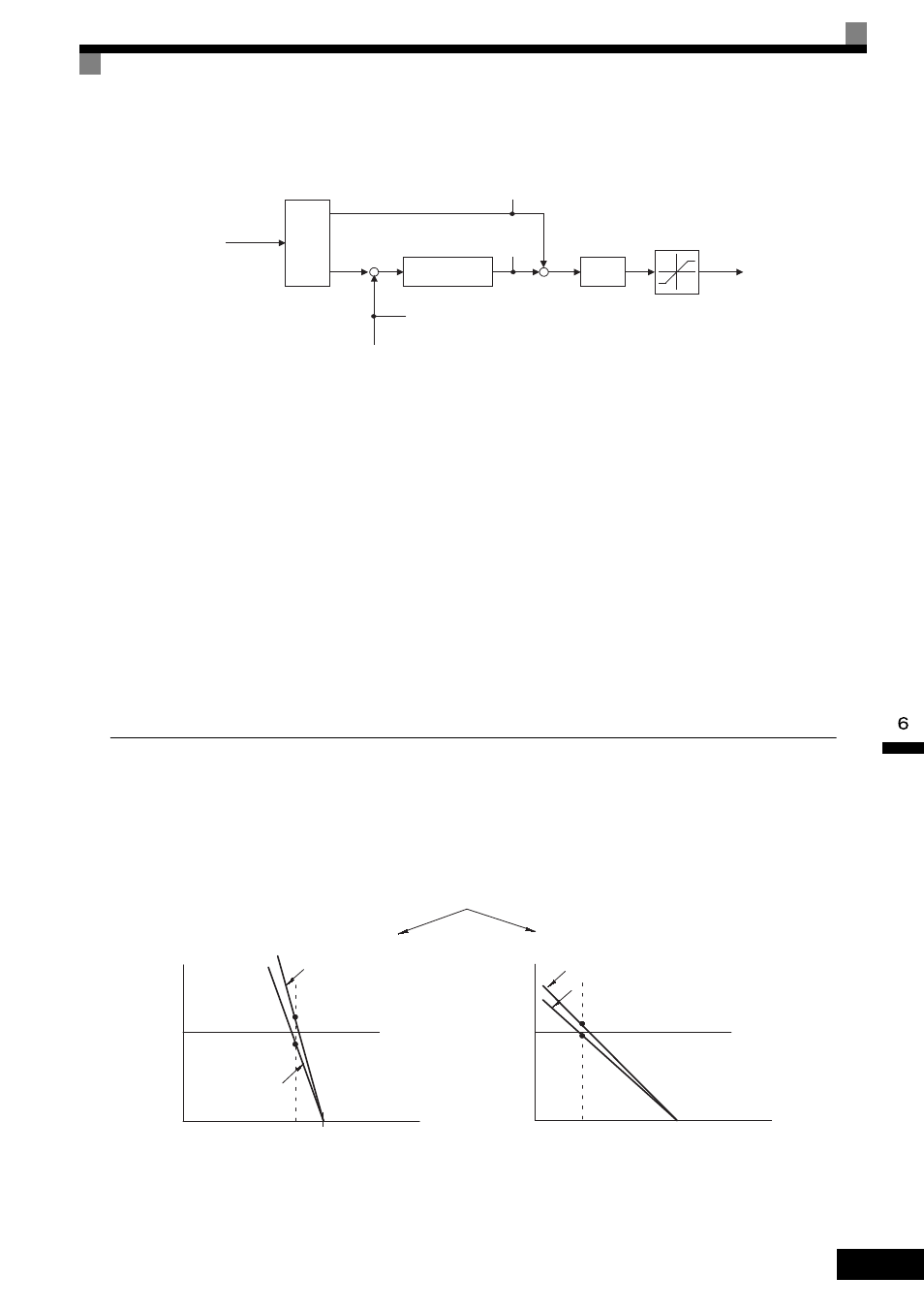
The following block diagram shows the speed controller (ASR) and the feed forward control structure.
Fig 6.76 Structure of Speed Controller (ASR) and Feed Forward Control
Setting Precautions
•
When n5-02 (Motor Acceleration Time) is not properly set, the acceleration time may not increase. The
default of n5-02 depends on the MxC capacity. When the MxC capacity is different from the motor capac-
ity, calculate an appropriate acceleration time using the equation given in n5-02 of Chapter 5 Parameters
and Settings or set the time that corresponds to the motor capacity by referring to Defaults for Various
MxC Capacities (o2-04) (Page 5-65)
•
When setting the Feed Forward Proportional Gain (n5-03), take the inertia of the motor to be equivalent to
1. If the speed reference response is slow, increase the Feed Forward Control Ratio Gain (n5-03). If over-
shoot occurs with the actual speed, or if a negative torque reference is output when acceleration is com-
pleted, reduce the Feed Forward Control Gain (n5-03).
•
When using the Droop Control function (i.e., if b7-01 is not set to 0.0), then disable feed forward control
(set n5-01 to 0).
Droop Control Function
Droop Control is a function that allows the user to set the amount of motor slip.
When a single load is operated with two motors (such as in a crane conveyor), a high-resistance motor is nor-
mally used. This set up takes advantage of torque characteristics that exhibit proportional changes due to
changes in the secondary resistance, thus maintaining both the overall speed and torque balance with the load.
If Droop Control is used, high-resistance motor characteristics can be set for a general-purpose motor.
Fig 6.77 Droop Control Function
㧗
㧗
㧙
㧗
C5-06
Frequency
reference
Feed
forward
controller
Detected speed
(Calculated speed)
Speed controller (ASR)
Primary
filter
(C5-10)
Torque limit
L7-01 to L7-04
Secondary
current
reference
n5-02, n5-03
U1-45
U1-44
U1-05
Torque characteristics of
motor A
Increase the difference
between T
A
and T
B
.
Decrease the difference
between T
A
and T
B
.
T
A
T
B
Torque characteristics of motor A
T
A
T
B
Torque characteristics of motor B
Torque characteristics
of motor B
Load torque
Load torque
Torque
The load balance changes in accordance with the amount of the slip
Torque
Reference speed
Speed
Reference speed
Speed
Load balance with general-purpose motor
Load balance with high-resistance motor