Notes on tuning the mxc – Yaskawa Matrix Converter User Manual
Page 97
4
-14
Notes on Tuning the MxC
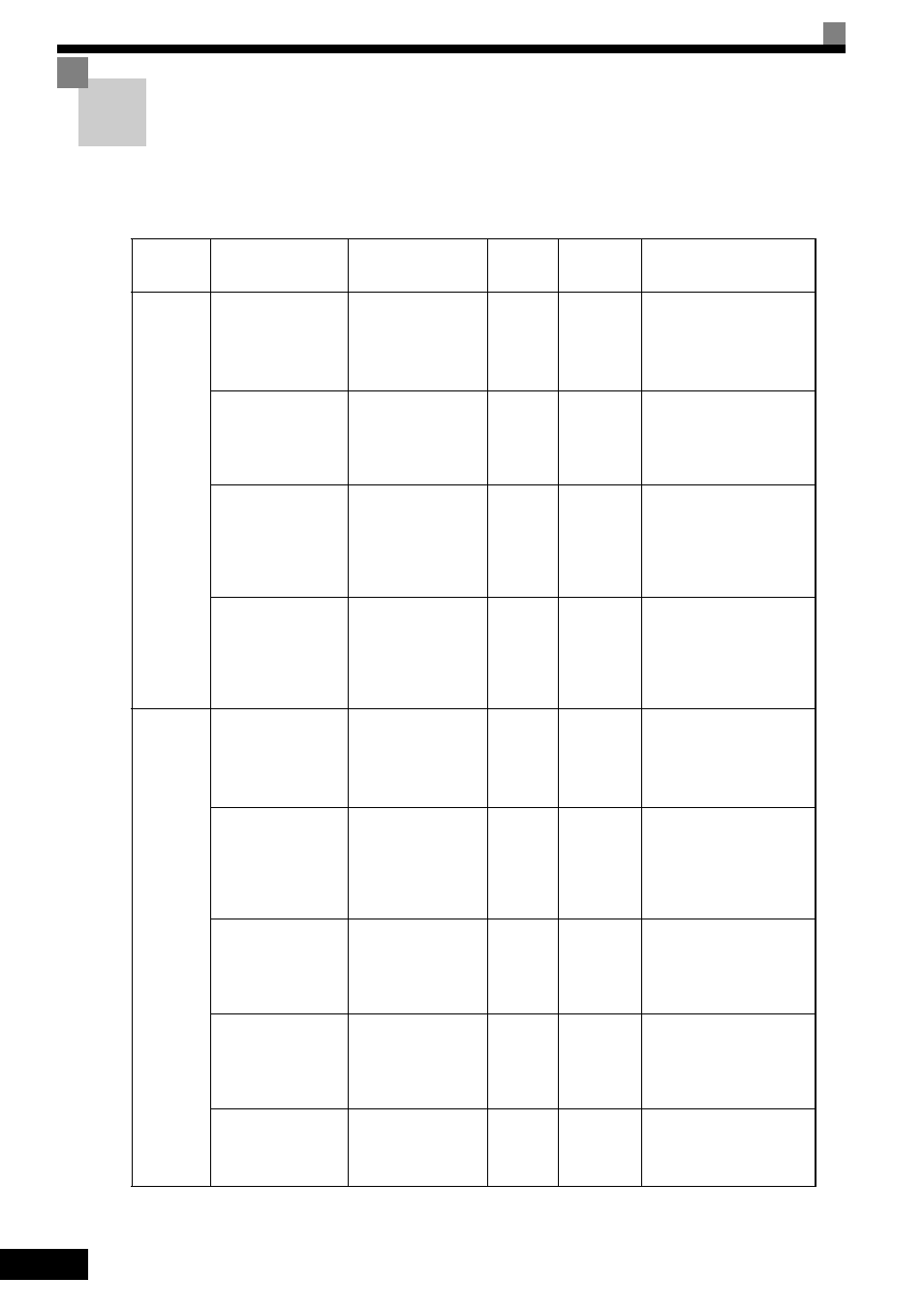
If hunting, oscillation, or other problems originating in the control system occur during Test Run, adjust
the parameters listed in the following table according to the control method. This table lists only the most
commonly used parameters.
Table 4.3 Adjusted Parameters
Control
Method
Parameters
Performance
Default
Recom-
mended
Setting
Adjustment Method
V/f control
(A1-02 = 0)
Middle Output
Frequency Voltage A
(E1-08)
Minimum Output
Voltage (E1-10)
• Improving torque at
low speeds
• Controlling shock at
startup
Depends
on capac-
ity and
voltage
Default to
Default + 3
to 5 V
*1
• Increase the setting if
torque is insufficient at
low speeds.
*2
• Reduce the setting if shock
at startup is large.
Torque Compensation
Primary Delay Time
(C4-02)
• Increasing torque
and speed response
• Controlling hunting
and oscillation
200 ms
200 to 1000
ms
• Reduce the setting if
torque or speed response is
slow.
• Increase the setting if hunt-
ing or oscillation occurs.
Torque Compensation
Gain (C4-01)
• Improving torque at
low speeds (10 Hz
or lower)
• Controlling hunting
and oscillation
1.00
0.50 to 1.50
• Increase the setting if
torque is insufficient at
low speeds.
• Reduce the setting if hunt-
ing or oscillation occurs
for light loads.
Hunting Prevention
Gain Setting (n1-02)
Controlling hunting
and oscillation in mid-
dle-range speeds (10 to
40 Hz)
1.00
0.10 to 2.00
• Reduce the setting if
torque is insufficient for
heavy loads.
• Increase the setting if hunt-
ing or oscillation occurs
for light loads.
Open loop
vector
control
(A1-02 = 2)
Middle Output Fre-
quency Voltage A
(E1-08)
Minimum Output
Voltage (E1-10)
• Improving torque at
low speeds
• Controlling shock at
startup
Depends
on capac-
ity and
voltage
Default to
Default + 1
or 2 V
*1
• Increase the setting if
torque or speed response is
slow.
*2
• Reduce the setting if shock
at startup is large.
Speed Feedback
Detection Control
(AFR) Gain
(n2-01)
• Increasing torque
and speed response
• Controlling hunting
and oscillation in
middle-range speeds
(10 to 40 Hz)
1.00
0.50 to 2.00
• Reduce the setting if
torque or speed response is
slow.
• Increase the setting if hunt-
ing or oscillation occurs.
Speed Feedback
Detection Control
(AFR) Time Constant
2 (n2-03)
Increasing torque and
speed response
750 ms
100 to 750
ms
• Reduce the setting if speed
response is slow during
sudden load change.
• Increase the setting if hunt-
ing or oscillation occurs.
Torque Compensation
Primary Delay Time
(C4-02)
• Increasing torque
and speed response
• Controlling hunting
and oscillation
20 ms
20 to
100 ms
• Reduce the setting if
torque or speed response is
slow.
• Increase the setting if hunt-
ing or oscillation occurs.
Slip Compensation
Primary Delay Time
(C3-02)
• Increasing speed
response
• Improving speed sta-
bility
200 ms
100 to
500 ms
• Reduce the setting if speed
response is slow.
• Increase the setting if the
speed is not stable.
* 1. The setting is given for 200 V class MxCs. Double the voltage for 400 V class MxCs.
* 2. An example of how to tune the MxC is described on the next page.