Yaskawa Matrix Converter User Manual
Page 263
6
-98
PID Feedback Input Methods
Select one of the following PID control feedback input methods.
Adjusting PID Settings
Use the following procedure to adjust PID while performing PID control and measuring the response wave-
form.
1. Set b5-01 (PID Function Setting) to 1 or 2 (PID control enabled).
2. Increase b5-02 (Proportional Gain Setting) to within a range that does not vibrate.
3. Reduce b5-03 (Integral Time Setting) to within a range that does not vibrate.
4. Increase b5-05 (Derivative Time) to within a range that does not vibrate.
Fine Tuning PID
This section explains the fine adjustment of PID after setting the PID control parameters.
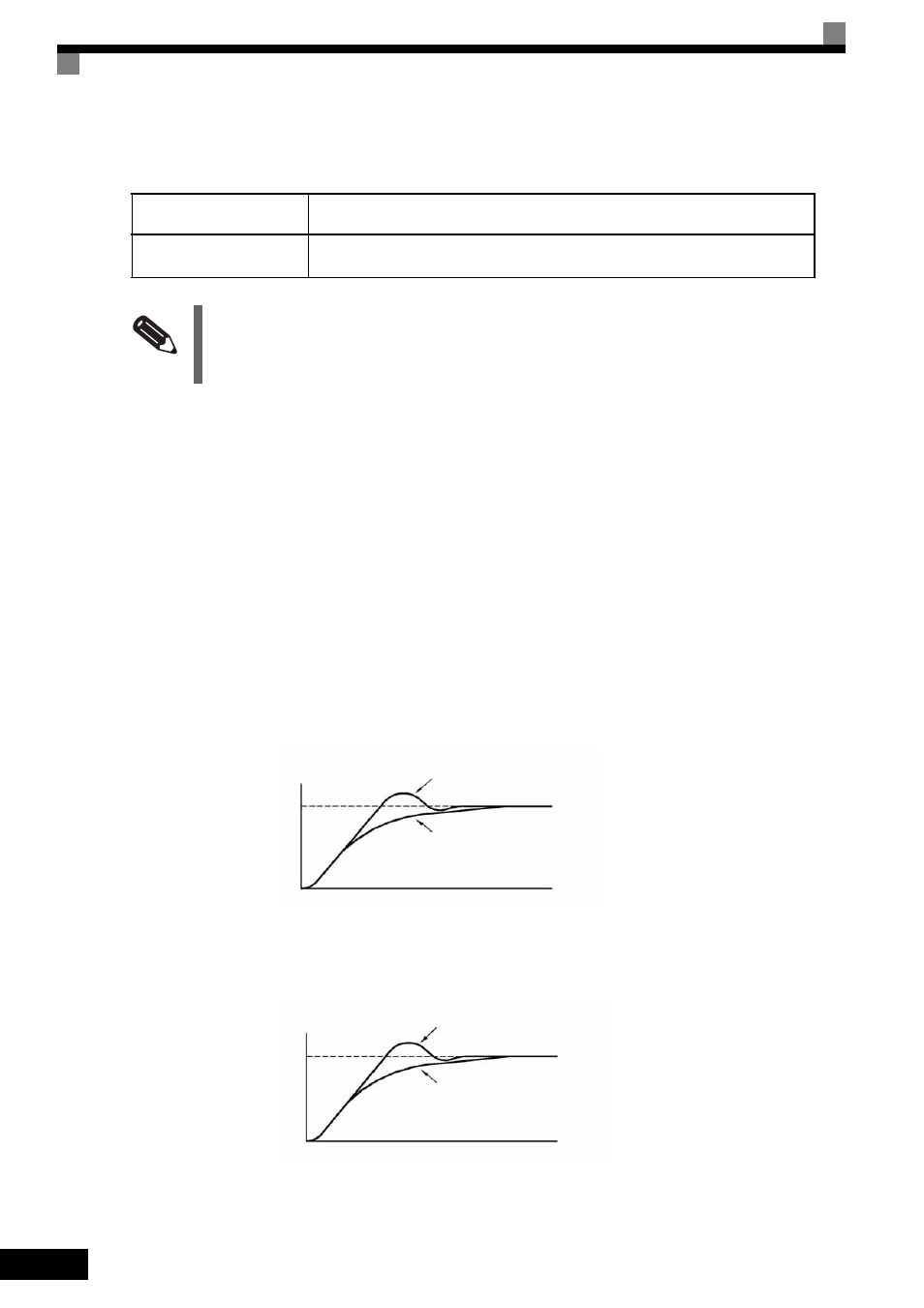
Suppressing Overshoot
If overshoot occurs, reduce derivative time (D), and increase integral time (I).
Set a Rapidly Stabilizing Control Condition
Reduce integral time (I), and lengthen derivative time (D) to quickly stabilize control even when overshoot
occurs.
Input Method
Setting Conditions
Multi-function analog input
Set H3-09 (Terminal A2 Function Selection) or H3-05 (Terminal A3 Function Selection)
to B (PID feedback).
INFO
Adjust PID target value and PID feedback value using the following items.
• Analog input: Adjust using the analog input terminal gain and bias.
Response
Before adjustment
After adjustment
Time
Response
Before adjustment
After adjustment
Time