Yaskawa Matrix Converter User Manual
Page 315
6
-150
* The setting is given for 200 V class MxCs. Double the voltage for 400 V class MxCs.
Note: 1. Do not change C4-01 (Torque Compensation Gain) from its default of 1.00 when using Open Loop Vector Control.
2. If speeds are inaccurate during regeneration in Open Loop Vector Control, enable Slip Compensation Selection during Regeneration (C3-04 = 1). If
speeds are inaccurate in the high-speed range, enable Output Voltage Limit Operation Selection (C3-05 = 1).
3. Do not use Slip Compensation Gain (C3-01) during V/f Control Method (A1-02 = 0). C3-01 is disabled as a default during V/f Control.
4. The torque and speed response of high-resistance (high-slip) motors are insufficient. Make appropriate adjustments to improve them. Low-resistance
(low-slip) motors are easily subject to hunting and oscillation.
5. The current at start may rise when C4-02 (Torque Compensation Primary Delay Time) is increased. Check the current during startup while adjusting
this parameter.
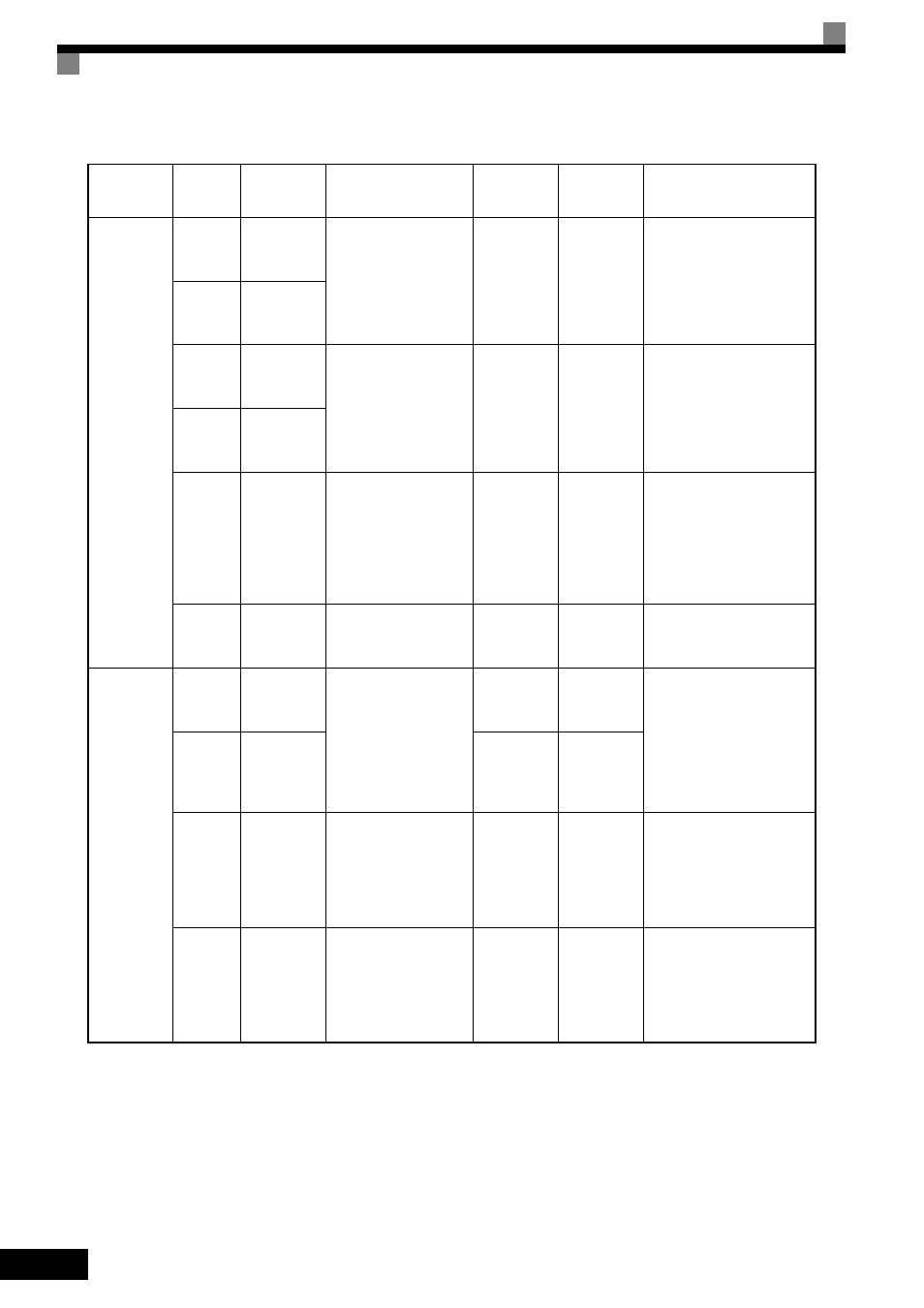
Flux Vector
Control
(A1-02 = 3)
C5-01
ASR Propor-
tional (P)
Gain 1
• Increases torque and
speed response
• Controls hunting and
oscillation
20.00
10.00 to
50.00
• Torque or speed response
is insufficient: Increase
the setting
• Hunting or oscillation
occurs: Reduce the setting
C5-03
ASR Propor-
tional (P)
Gain 2
C5-02
ASR Inte-
gral (I) Time
1
• Increases torque and
speed response
• Controls hunting and
oscillation
0.500 s
0.300 to
1.000 s
• Torque or speed response
is insufficient: Reduce the
setting
• Hunting or oscillation
occurs: Increase the set-
ting
C5-04
ASR Inte-
gral (I) Time
2
C5-07
ASR Switch-
ing Fre-
quency
Switches the ASR pro-
portional gain and inte-
gral time according to
the output frequency.
0.0 Hz (no
switching)
0.0 to max
output fre-
quency
Set the output frequency at
which to change the ASR
proportional gain and inte-
gral time when the same val-
ues cannot be used for both
high-speed and low-speed
operation.
C5-06
ASR Pri-
mary Delay
time
Controls hunting and
oscillation
0.004 s
0.004 to
0.020 s
Machine rigidity is low and
the system vibrates easily:
Increase the setting
V/f Control
Method (A1-
02 = 0)
E1-08
Mid Output
Frequency
Voltage (VC) • Improves torque at
low speeds
• Controlling shock at
startup
14.0 VAC
*
13.0 to 16.0
VAC
*
• Torque is insufficient at
low speeds: Increase the
setting
• Shock at startup is large:
Reduce the setting
E1-10
Min. Output
Frequency
Voltage
(VMIN)
7.0 VAC
*
7.0 to 10.0
VAC
*
C4-01
Torque Com-
pensation
Gain
• Improves torque at
low speeds (10 Hz or
lower)
• Controlling hunting
and oscillation for
light loads
1.00
0.50 to 1.50
• Torque is insufficient at
low speeds: Increase the
setting
• Hunting or oscillation
occurs for light loads:
Reduce the setting
n1-02
Hunting-Pre-
vention gain
Controls hunting and
oscillation in middle-
range speeds (10 to 40
Hz)
1.00
0.50 to 2.00
• Torque is insufficient for
heavy loads: Reduce the
setting
• Hunting or oscillation
occurs for light loads:
Increase the setting
Table 6.4 Control-Related Adjustments (Continued)
Control
Method
Parame-
ter Num-
ber
Name
Performance
Factory
Setting
Recom-
mended
Setting
Adjustment Method