Related parameters, Adjusting torque compensation gain – Yaskawa Matrix Converter User Manual
Page 200
Improved Operating Efficiency
6-
35
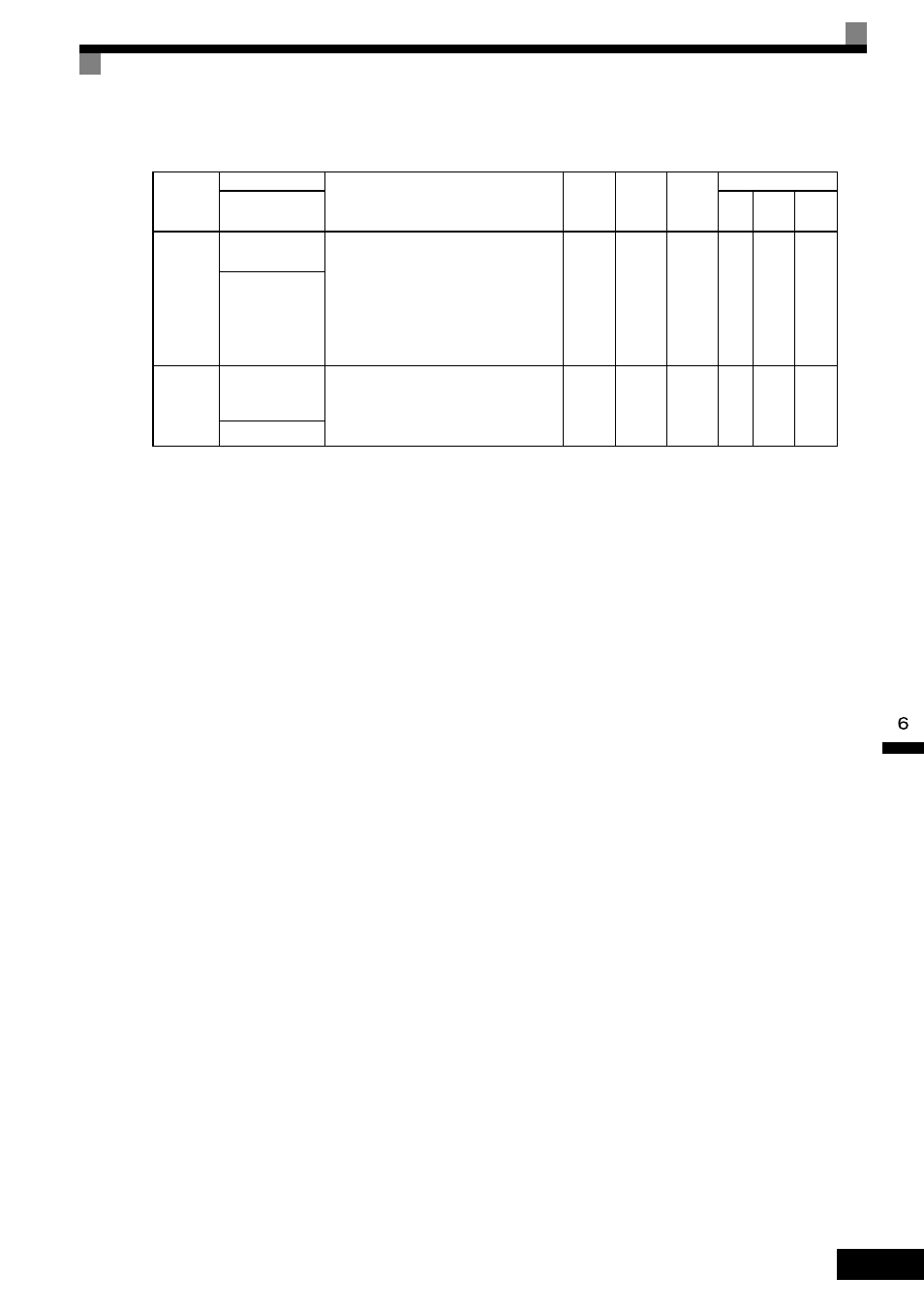
Related Parameters
* The default will change when the control method is changed. The open loop vector defaults are given.
Adjusting Torque Compensation Gain
Normally, there is no need to change this setting. Do not adjust the torque compensation gain when using
Open Loop Vector Control.
Adjust the torque compensation gain using V/f Control Method in the following circumstances:
•
If the cable is very long, increase the set value.
•
If the (maximum applicable) motor capacity is smaller than the MxC capacity, increase the set value.
•
If the motor oscillates, reduce the set value.
Adjust this parameter so that the output current during low-speed rotation does not exceed the MxC rated out-
put current range.
Adjusting the Torque Compensation Primary Delay Time Constant
Set the primary delay for the torque compensation function in milliseconds.
Switch the defaults as follows by changing the control method settings:
•
V/f Control: 200 ms
•
Open Loop Vector Control: 100 ms
Normally, there is no need to make this setting. Adjust the parameter as shown below.
•
If the motor is vibrating, increase the set value.
•
If the motor response is low, decrease the set value.
Parameter
Number
Name
Description
Setting
Range
Default
Change
during
Run
Control Methods
Display
V/f
Open
Loop
Vector
Flux
Vector
C4-01
Torque Compensa-
tion Gain
This parameter sets the gain for the MxC's
automatic torque boost function to match the
MxC's output voltage to the motor load. This
parameter helps to produce better starting
torque. It determines the amount of torque or
voltage boost based upon motor current,
motor resistance, and output frequency.
Adjustment is not normally required.
0.00 to
2.50
1.00
Yes
A
A
No
Torq Comp Gain
C4-02
Torque Compensa-
tion Primary Delay
Time
This parameter adjusts the filter on the output
of the torque compensation function. Increase
to add stability, decrease to improve response.
Adjustment is not normally required.
0 to
10000
20 ms
*
No
A
A
No
Torq Comp Time