Related parameters – Yaskawa Matrix Converter User Manual
Page 193
6
-28
Operation Avoiding Resonance (Jump Frequency Function)
The jump frequency function operates the motor while avoiding resonance caused by characteristic frequen-
cies in the machinery.
This function creates a deadband frequency range, and restricts the MxC from operating at those frequencies.
Although the MxC is prohibited from the jump frequency range while operating at a constant speed, it will
still sweep through that range during acceleration and deceleration.
Related Parameters
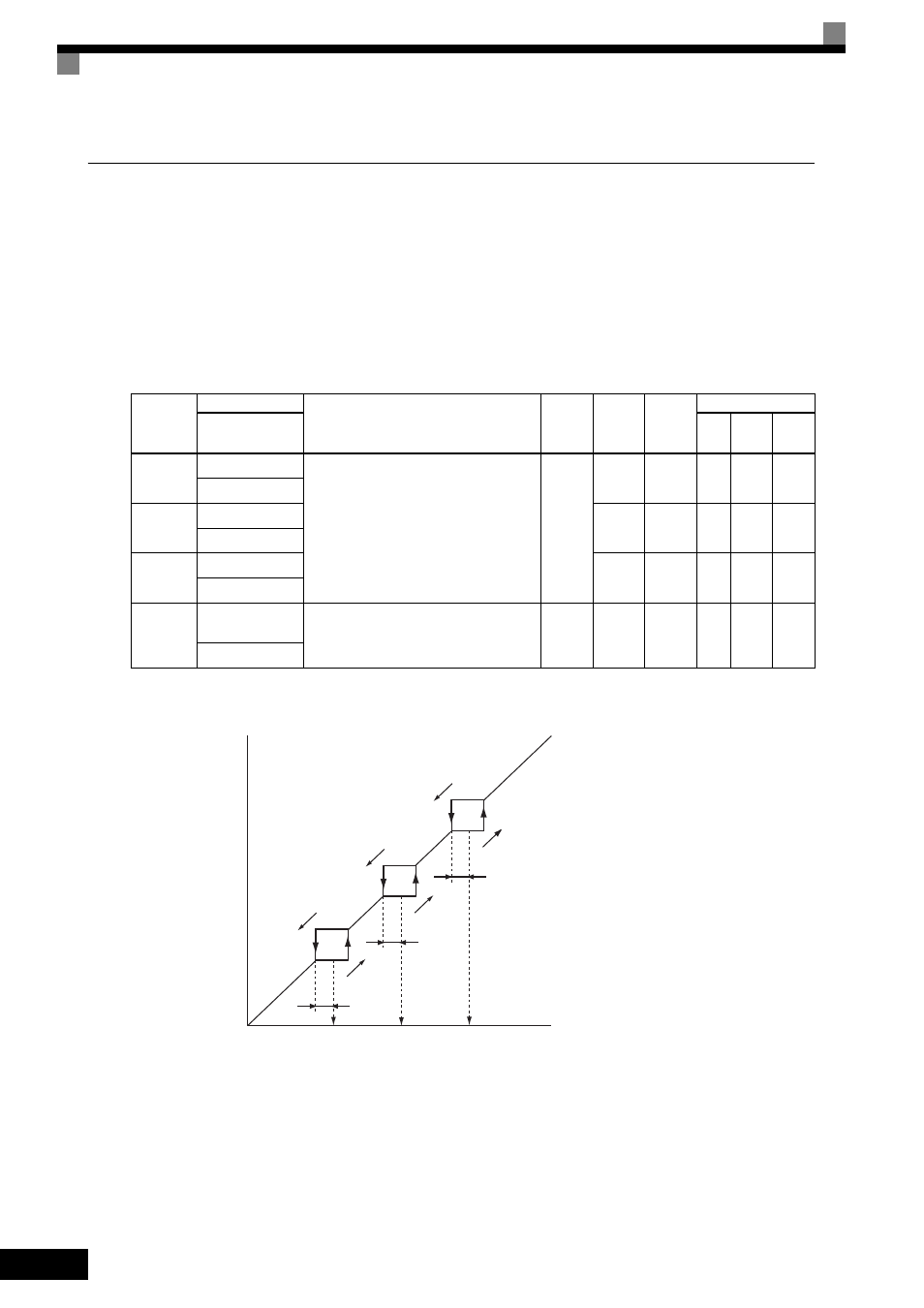
The relationship between the output frequency and the jump frequency reference is as follows:
Fig 6.31 Jump Frequency
Parameter
Number
Name
Description
Setting
Range
Default
Change
during
Run
Control Methods
Display
V/f
Open
Loop
Vector
Flux
Vector
d3-01
Jump Frequency 1
Set the center values of the jump frequencies
in Hz.
This function is disabled by setting the jump
frequency to 0 Hz. Always ensure that the fol-
lowing applies:
d3-01
≥ d3-02 ≥ d3-03
Operation in the jump frequency range is pro-
hibited but during acceleration and decelera-
tion, speed changes smoothly without jump.
0.0 to
120.0
0.0 Hz
No
A
A
A
Jump Freq 1
d3-02
Jump Frequency 2
0.0 Hz
No
A
A
A
Jump Freq 2
d3-03
Jump Frequency 3
0.0 Hz
No
A
A
A
Jump Freq 3
d3-04
Jump Frequency
Width
Sets the jump frequency bandwidth in Hz.
The jump frequency will be the jump fre-
quency
± d3-04.
0.0 to
20.0
1.0 Hz
No
A
A
A
Jump Bandwidth
Output frequency
Jump frequency reference
Jump
Frequency
Width d3-04
Jump
Frequency
3 (d3-03)
Jump
Frequency
2 (d3-02)
Jump
Frequency
1 (d3-01)
Frequency reference descending
Frequency
reference
ascending
Jump
Frequency
Width d3-04
Jump Frequency Width d3-04