Torque limit operation examples, Individual functions – Yaskawa Matrix Converter User Manual
Page 278
Individual Functions
6-
113
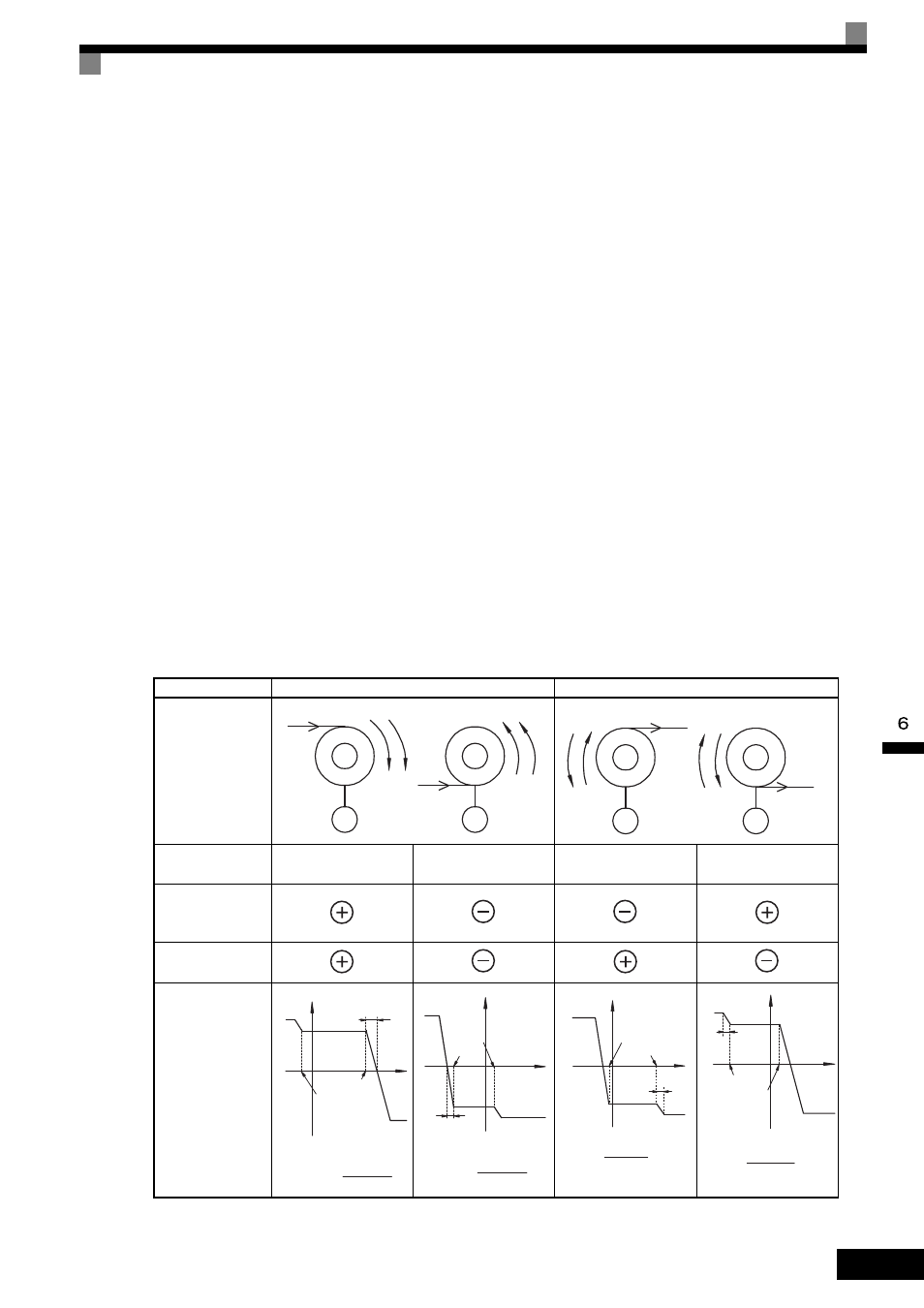
Torque Limit Operation Examples
Operation examples will be described separately for winding operation, in which the speed and motor torque
are in the same directions, and unwinding operation, in which the speed and motor torque are in opposite
directions.
Winding Applications
In a winding operation, the line (speed) and torque generated by the motor are in the same direction. For the
winding operation, both the speed limit and the torque reference input are positive. The motor will accelerate
when the torque reference input is larger than the load and will decelerate when it is smaller than the load. If
the motor turns faster than the speed limit, a negative compensation value is output from the speed limiter cir-
cuit. When the speed then drops below the speed limit, a positive compensation value is output. The torque
compensation is proportional to the ASR proportional gain. When the sum of the torque reference and the
torque compensation output by the speed limiter is the same as the actual load, the motor will stop accelerating
and run at a constant speed.
Unwinding Applications
In an unwinding operation, the line (speed) and torque generated by the motor are in the opposite directions.
(In this example, we’ll assume that the line speed is positive and the torque reference input is negative.) For
the unwinding operation, the speed limit is positive and the torque reference input is negative. If the motor
turns faster than the speed limit, a negative compensation value is output from the speed limiter circuit. If the
motor is rotating in reverse, a negative compensation value is output. If the speed is 0 or is below the speed
limit, a 0 compensation value is output. In this way, the output from the speed limiter is used to maintain the
motor speed between 0 and the speed limit. When the sum of the torque reference and the torque compensa-
tion output by the speed limiter is the same as the actual load, the motor will stop accelerating and run at a
constant speed.
Winding Applications
Unwinding Applications
Configuration
Normal Rotation
Direction
Forward
Reverse
Forward
Reverse
Torque
Reference
Polarity (TREF)
Speed Limit
Polarity (SLIM)
Generated
Torque
X
M
Line direction
N
T
N
T
X
M
Line direction
X
M
Line direction
X
M
Line direction
N
T
N
T
Torque
limit
Torque
limit
Speed
SLIM
0
DN
(d5-05)
ǍN(%)=
TREF(%)
C5-01
TREF
Torque
Torque
limit
Torque
limit
Speed
Torque
SLIM
0
ǍN
TREF
(d5-05)
ǍN(%)=
TREF(%)
C5-01
Torque
limit
Torque
limit
Speed
Torque
SLIM
0
ΔN
TREF
(d5-05)
ǍN(%)= or
d5-05(%) that is smaller.
TREF(%)
C5-01
Torque
limit
Torque
limit
Speed
Torque
SLIM
0
ΔN
TREF
(d5-05)
Δ
N(%)= or
d5-05(%) that is smaller.
TREF(%)
C5-01