Yaskawa Matrix Converter User Manual
Page 266
Individual Functions
6-
101
PID Feedback Loss Detection
When performing PID control, be sure to use the PID feedback loss detection function. If PID feedback is lost,
the MxC output frequency may accelerate to the maximum output frequency.
When setting b5-12 to 1 and the status of the PID feedback value detection level in b5-13 is insufficient and
continues for the time set in b5-14, an FbL (PID feedback reference lost) alarm will be displayed on the digital
operator and MxC operation will continue.
When b5-12 is set to 2, an FbL (PID feedback reference lost) error alarm will be displayed on the digital oper-
ator, the error contact will operate, and MxC operation will be stopped.
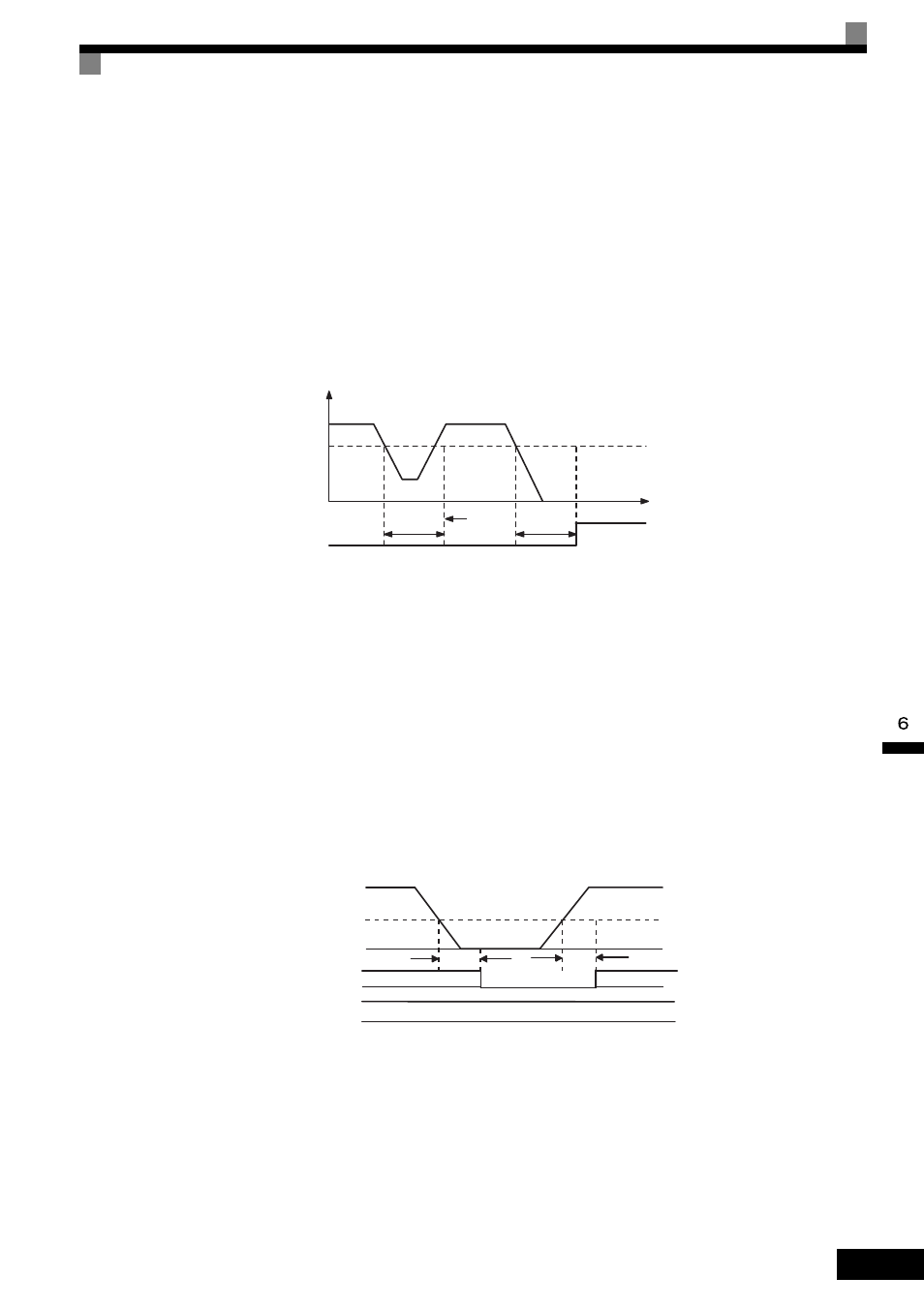
The time chart for PID feedback loss detection (set b5-12 to 2) is shown below.
Fig 6.64 PID Feedback Loss Detection Time Chart
PID Sleep
The PID sleep function stops the MxC when the PID sleep function delay time continues while the PID con-
trol target value is at an insufficient level to operate the PID sleep function. When the PID sleep delay time
continues and the PID control target value is above the PID sleep function operation level, MxC operation will
automatically resume.
When PID control is disabled, the PID sleep function is also disabled. When using the PID sleep function,
select decelerate to stop or coast to stop as the stopping method.
The PID sleep time chart is shown below.
Fig 6.65 PID Sleep Time Chart
PID feedback value
PID Feedback
Loss detection
Level
(b5-13)
PID Feedback
Loss Detection Time
(b5-14)
No FbL
detection
FbL detection
Time
PID Feedback
Loss Detection Time
(b5-14)
PID target value
PID Sleep Function
Start Level (b5-15)
Sleep operation
delay time
Sleep operation
delay time
Run Command has been input
Operation status output
Internal Run Command
External Run Command
Operating
Operation
Stopped
b5-16
b5-16