Yaskawa Matrix Converter User Manual
Page 199
6
-34
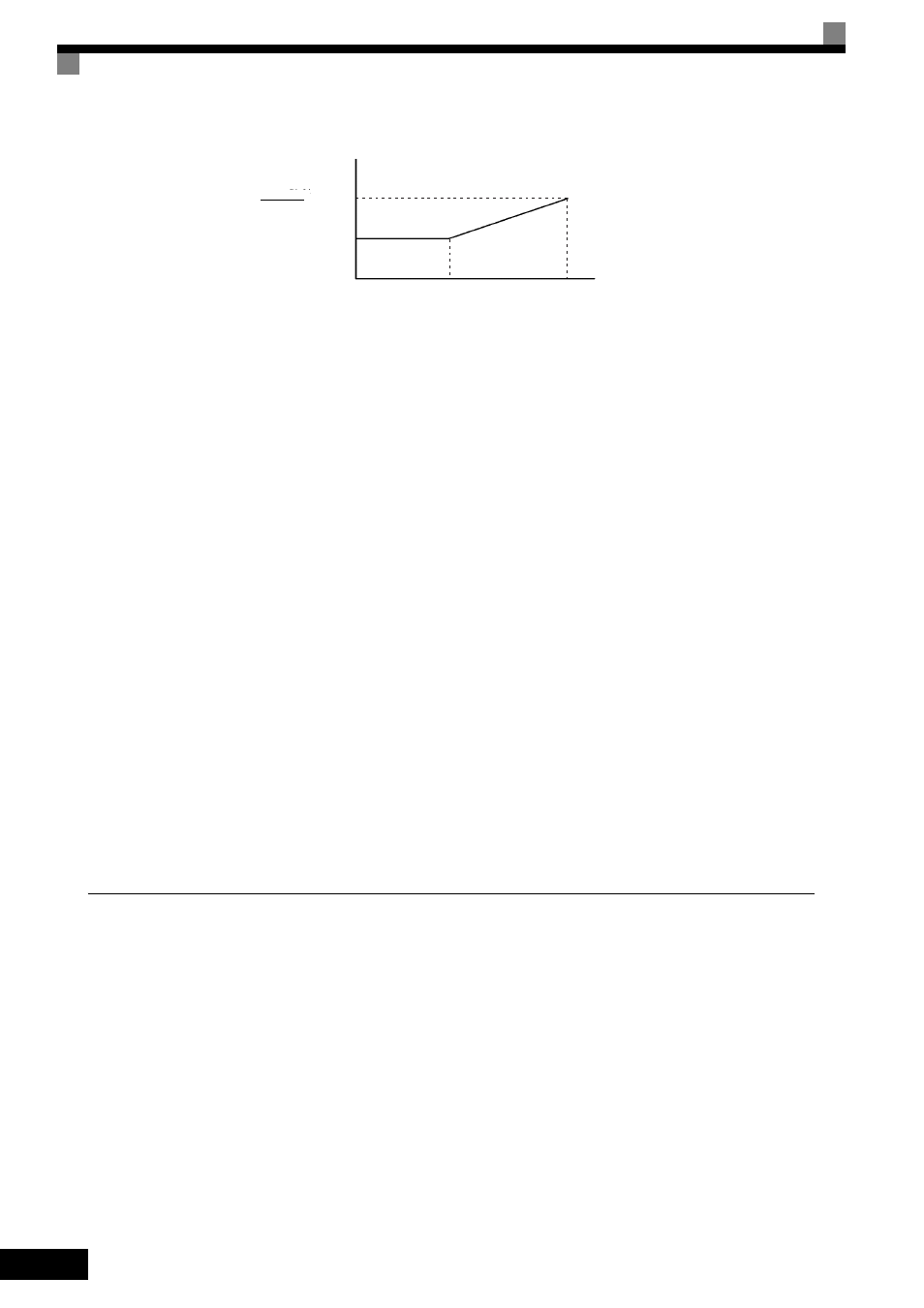
Fig 6.34 Slip Compensation Limit
Selecting Slip Compensation Function during Regeneration
Set the MxC to enable or disable the slip compensation function during regeneration.
Activating slip compensation during regeneration will help improve speed control.
Selecting Output Voltage Limit Operation
If output voltage saturation occurs while the output voltage limit operation is disabled, the output current will
not change, but torque control accuracy will be lost. If torque control accuracy is required, change the settings
to enable the output voltage limit operation.
If the output voltage limit operation is enabled, motor magnetic flux current is controlled automatically, and
torque control accuracy is maintained to limit the output voltage references. Consequently, the output current
will increase by approximately 10% maximum (with rated load) compared with when the output voltage limit
operation is disabled, so check the margin of the MxC rated current.
Setting Precautions
•
It is not necessary to change the output voltage limit operation if using the device at medium to low speed
only, if the power supply voltage is 10% or more higher than the motor rated voltage, or if the torque con-
trol accuracy at high speeds is insufficient.
•
If the power supply voltage is too low compared with the motor rated voltage, torque control accuracy may
be lost even if the output voltage limit operation is enabled.
Compensating for Insufficient Torque at Startup and Low-Speed Opera-
tion (Torque Compensation)
The torque compensation function detects that the motor load has increased, and increases the output torque.
V/f Control Method calculates and adjusts the motor primary loss voltage according to the output voltage (V),
and compensates for insufficient torque at start up and during low-speed operation. Calculate the compensa-
tion voltage as follows: motor primary voltage loss
× parameter C4-01.
Vector control separates the motor excitation current and the torque current by calculating the motor primary
current, and controlling each of the two separately.
Calculate the torque current as follows: Calculated torque reference
× C4-01
Slip compensation limit
Output frequency
E1-06: Base Frequency
E1-04: Maximum Output Frequency
E1-06
E1-04
C3-03
× C3-03
E1-04
E1-06