7 using torque control – Yaskawa DR2 Sigma Servo User Manual
Page 104
3.2 Setting User Constants According to Host Controller
91
3.2.7 Using Torque Control
1) The Servopack can provide the following torque control:
D
Torque restriction
Level 1: To restrict the maximum output torque to protect
the machine or workpiece
Level 2: To restrict torque after the motor moves the
machine to a specified position
D
Torque control
Level 3: To always control output torque, not speed
Level 4: To switch between speed control and torque
control
This section describes how to use levels 3 and 4 of the torque control function.
2) Use the following memory switch to select level 3 (torque control I) or level 4 (torque con-
trol II).
Cn-01 Bit A
Control Mode Selection
Factory
Setting: 0
For Speed/Torque Control
Only
Cn-01 Bit B
Control Mode Selection
Factory
Setting: 0
For Speed/Torque Control
Only
This is dedicated torque control.
A motor torque reference value is externally input into the Servopack to control torque.
Examples of Use: Tension control
Pressure control
Cn-01
Setting
Control Mode
Bit B Bit A
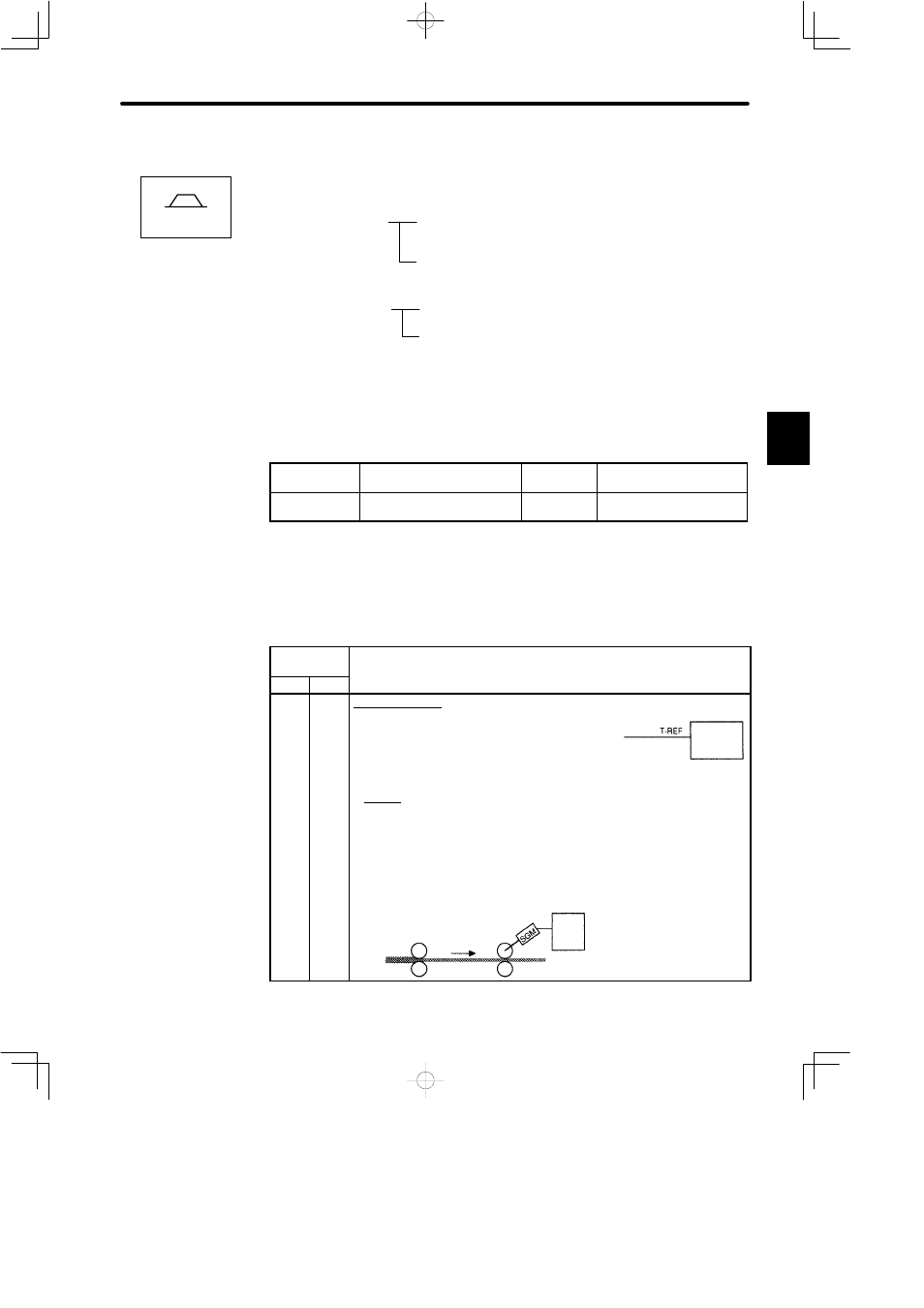
Control Mode
Torque Control I
This is a dedicated torque control mode.
D
A torque reference is input from T-REF
(1CN-9).
Torque
reference
Servopack
(1CN-9)
1
0
D
P-CON is not used.
D
Speed reference input V-REF (1CN-5)
cannot be used.
D
User constant Cn-14 can be used for
maximum speed control.
Example of Use:
Tension control
Tension
Servo-
pack
3
Speed