Yaskawa DR2 Sigma Servo User Manual
Page 56
BASIC USES OF Σ-SERIES PRODUCTS
2.4.2 Step 1: Conducting a Test Run for Motor without Load cont.
42
(2) Check the following items in monitor mode (Refer to 4.6.1.):
(1) Has a reference speed been input?
(2) Is the motor speed as designed?
(3) Does the reference speed match the actual motor speed?
(4) Does the motor stop when no reference is input?
Un-00 Actual motor speed
Un-01 Reference speed
(3) If the motor rotates at an extremely slow speed when 0 V is specified as the reference
voltage, correct the reference offset value as described in Section 4.2.4 Reference
Offset Automatic Adjustment
(4) To change motor speed or the direction of rotation, reset the user constants shown
below.
Cn-03
Speed reference gain (Refer to 3.2.7.)
Cn-02 bit 0
Reverse rotation mode (Refer to 3.1.1.)
Position Control Mode
(1) Set user constant Cn-02 so that the reference pulse form matches the host controller
output form. (Refer to 4.1.5 for details on how to set user constants.)
Selecting reference pulse form (Refer to 3.2.2.)
Bit 3
Cn-02
Bit 4
Bit 5
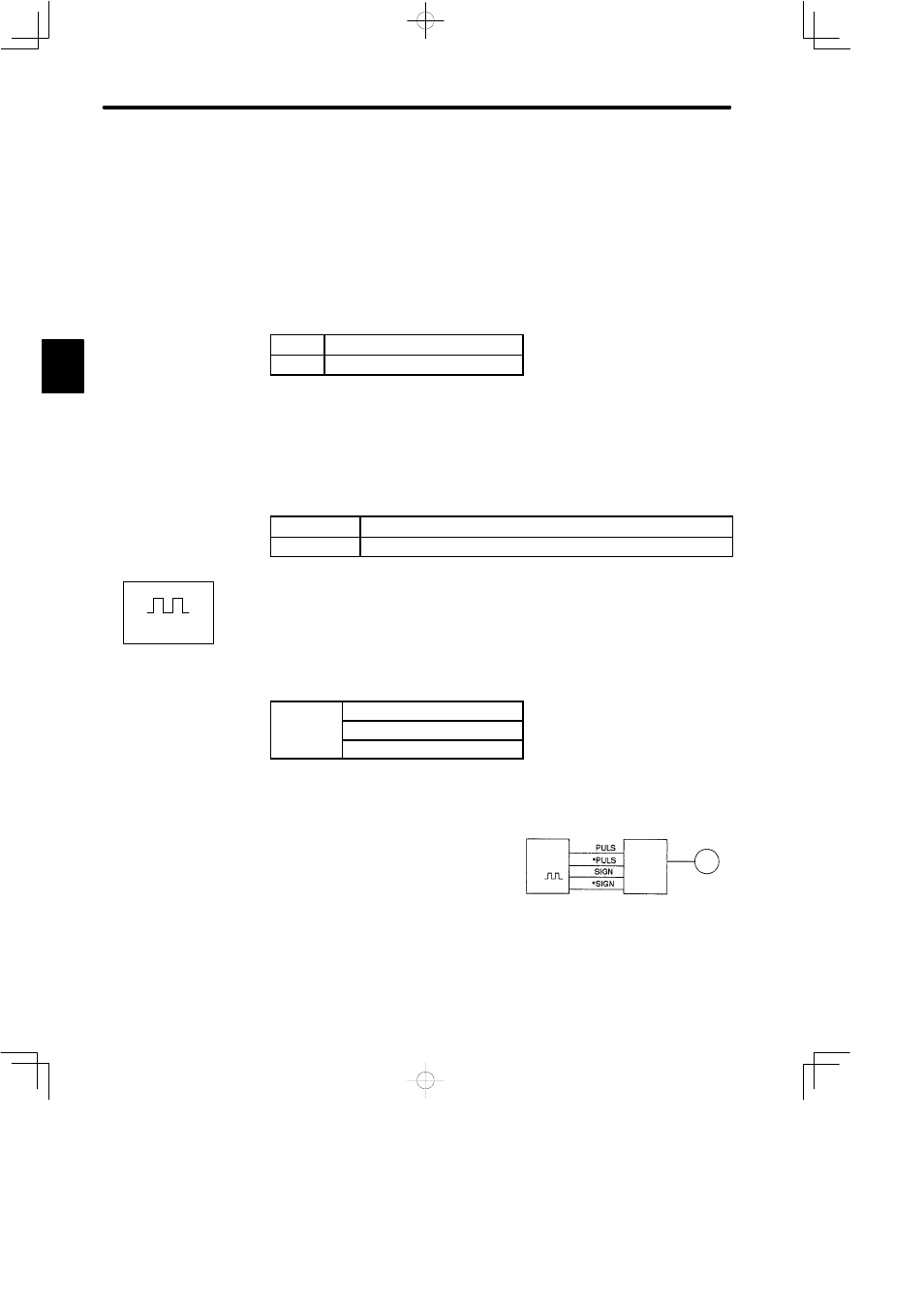
(2) Input a slow speed pulses from the host con-
troller and execute low-speed operation.
2
Positions
Host
controller
Servopack
Refer-
ence
pulse
Servomotor
(1CN−7)
(1CN−8)
(1CN−11)
(1CN−12)