Yaskawa DR2 Sigma Servo User Manual
Page 504
Advertising
REVIEWING THE FULL-CLOSED LOOP SPECIFICATIONS
496
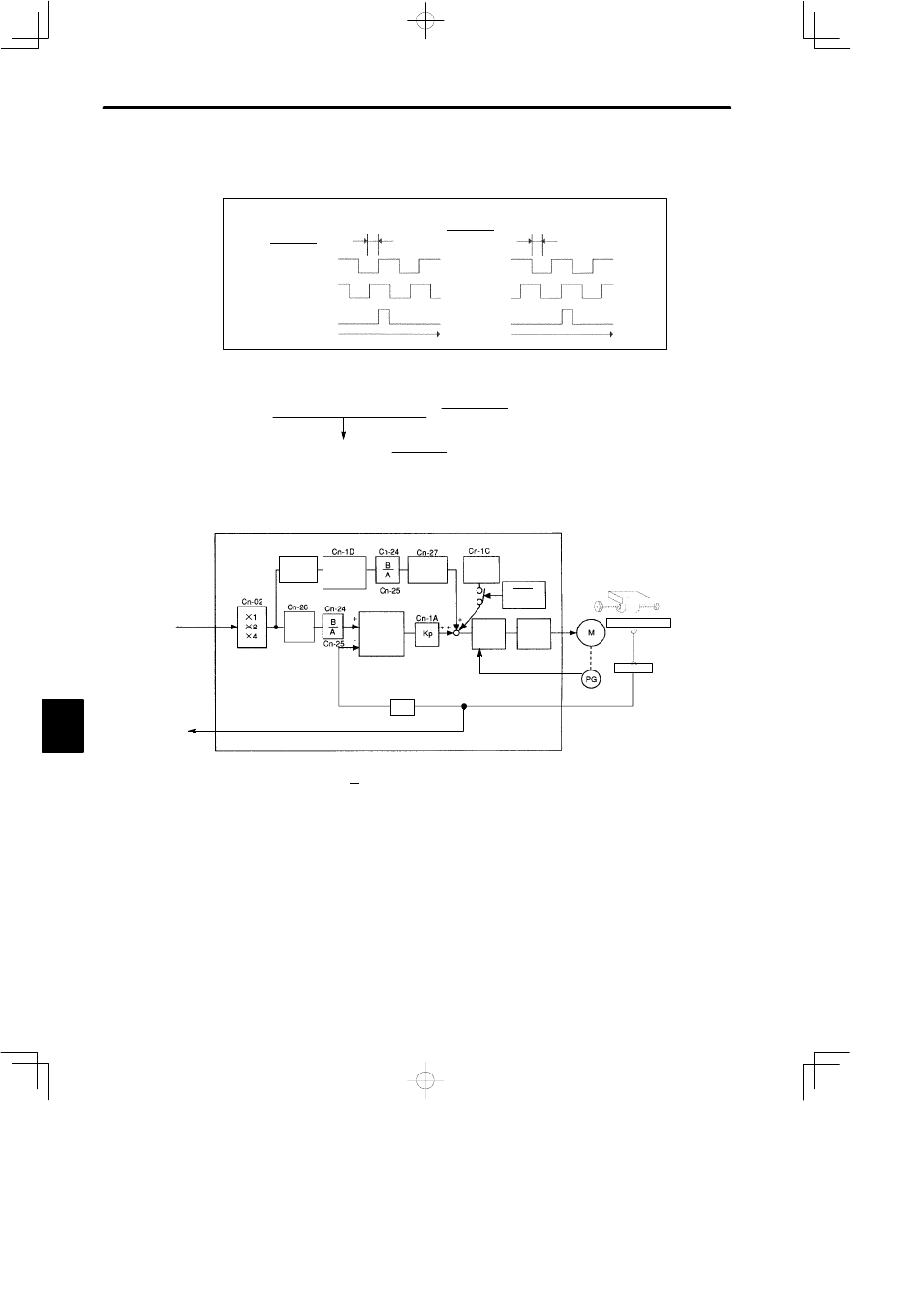
e) Output Phase Form: Refer to the following phase relation for the feedback pulse to
Servopack
Forward
90_
Reverse
90_
Phase−A
Phase−B
Phase−C
Phase−A
Phase−B
Phase−C
Forward: CCW when viewed from the drive end
Reference pulse frequency =
= 200kPPS
20mm/s
0.1µm/pulse
Motor Speed =
×60s/min = 600r/min
20mm/s
2mm/rev
• When incremental encoder is used:
DR2 Servopack
Feed
forward
gain
Primary
lag filter
Bias
COIN
signal
Speed
loop
Current
loop
SGM
Servomotor
Encoder
Error
counter
Smooth-
ing
Differ-
entiation
Reference
pulse
PG signal
output
Position Detector
Amplifier
Note: Semi−closed and full−closed cannot be changed by internal setting.
(DR2−jjjCj−F is the full−closed loop type Servopack.)
×4
G
Advertising
This manual is related to the following products: