2 using the smoothing function, 3 adjusting gain – Yaskawa DR2 Sigma Servo User Manual
Page 128
3.5 Running the Motor Smoothly
115
3.5.2 Using the Smoothing Function
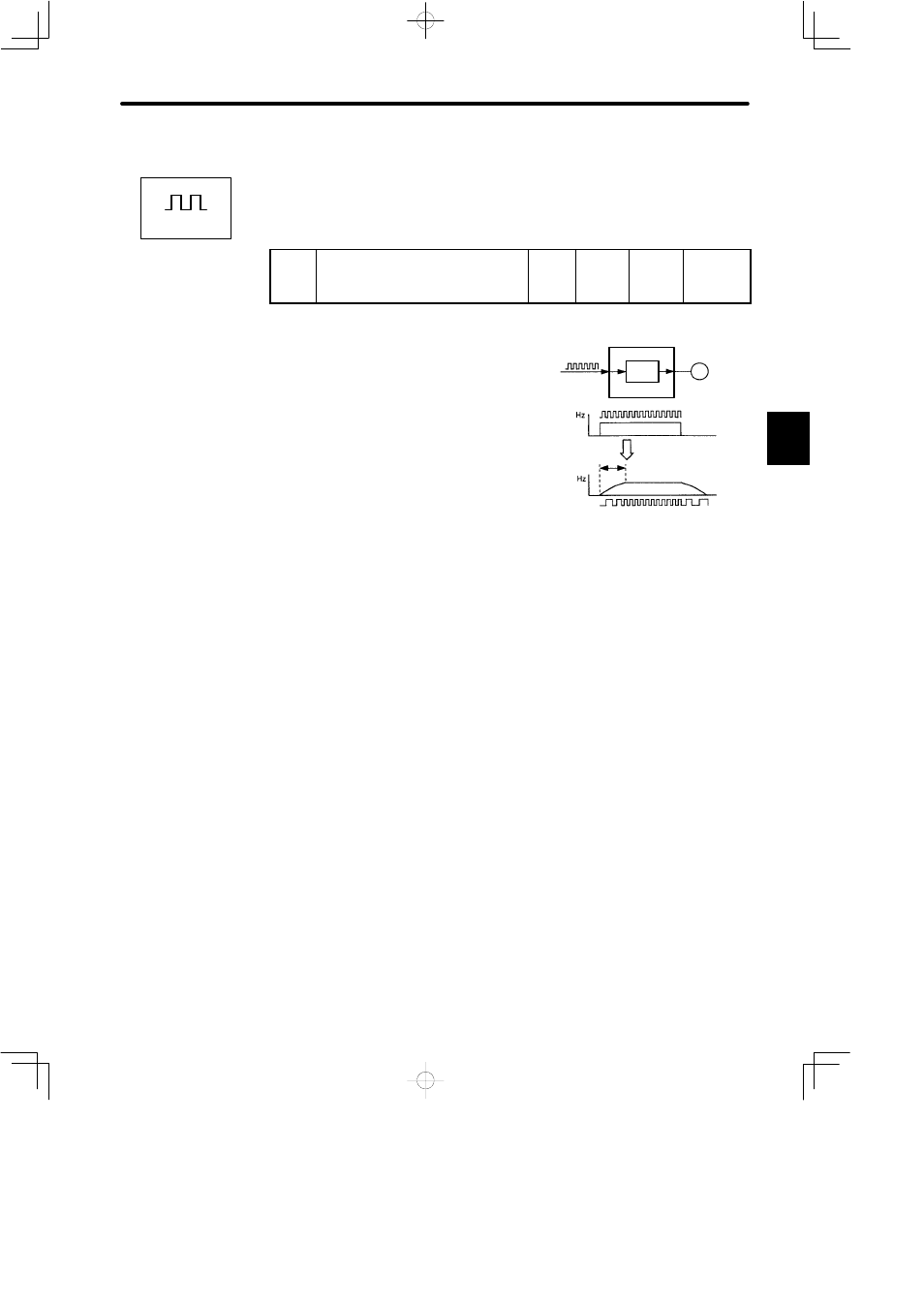
1) The smoothing function adjusts constant-frequency reference input inside the Servo-
pack so that acceleration and deceleration can be as constant as possible. To use this
function, set the following user constant.
Cn-26
ACCTME
Position Reference
Acceleration/Deceleration
Time Constant
(Smoothing)
Unit:
0.1 ms
Setting
Range:
0 to 640
Factory
Setting:
0
For
Position
Control
Only
This user constant is used for position control
only.
This function performs acceleration/deceleration
processing for input reference pulses (primary lag
characteristics).
This function prevents the motor from running at
progressive speeds in the following cases:
• When the host controller which outputs refer-
ences cannot perform acceleration/decelera-
tion processing
• When reference pulse frequency is too low
• When reference electronic gear ratio is too high (more than 10 times)
This function does not change the travel distance (number of pulses).
3.5.3 Adjusting Gain
1) If speed loop gain or position loop gain exceeds the allowable limit for the servo system
including the machine to be controlled, the system will vibrate or become too susceptible.
Under such conditions, smooth operation cannot be expected. Reduce each loop gain
value to an appropriate value.
2) For servo gain adjustment, refer to the following section:
3.6.2 Setting Servo Gain
3
Positions
Reference
pulse
Servopack
Accel/
decel
Servomotor
Reference
pulse
frequency
Apply acceleration/deceleration
processing
Reference
pulse
frequency
Cn-26 (ACCTME)