4 supplementary information on test run – Yaskawa DR2 Sigma Servo User Manual
Page 59
2.4 Conducting a Test Run
45
2.4.4 Supplementary Information on Test Run
In the following cases, always refer to the information described below before starting a test
run:
• When using a servomotor with a brake
• When performing position control from the host controller
1) When using a servomotor with brake
The brake prevents the motor shaft from rotating due to a backdriving torque. Such a
torque may be created by an external force or the force of gravity acting on the load and
may result in undesired motion or the load, should motor power be lost.
Servopack uses the brake interlock output (BK) signal to control holding brake operation
for a servomotor with brake.
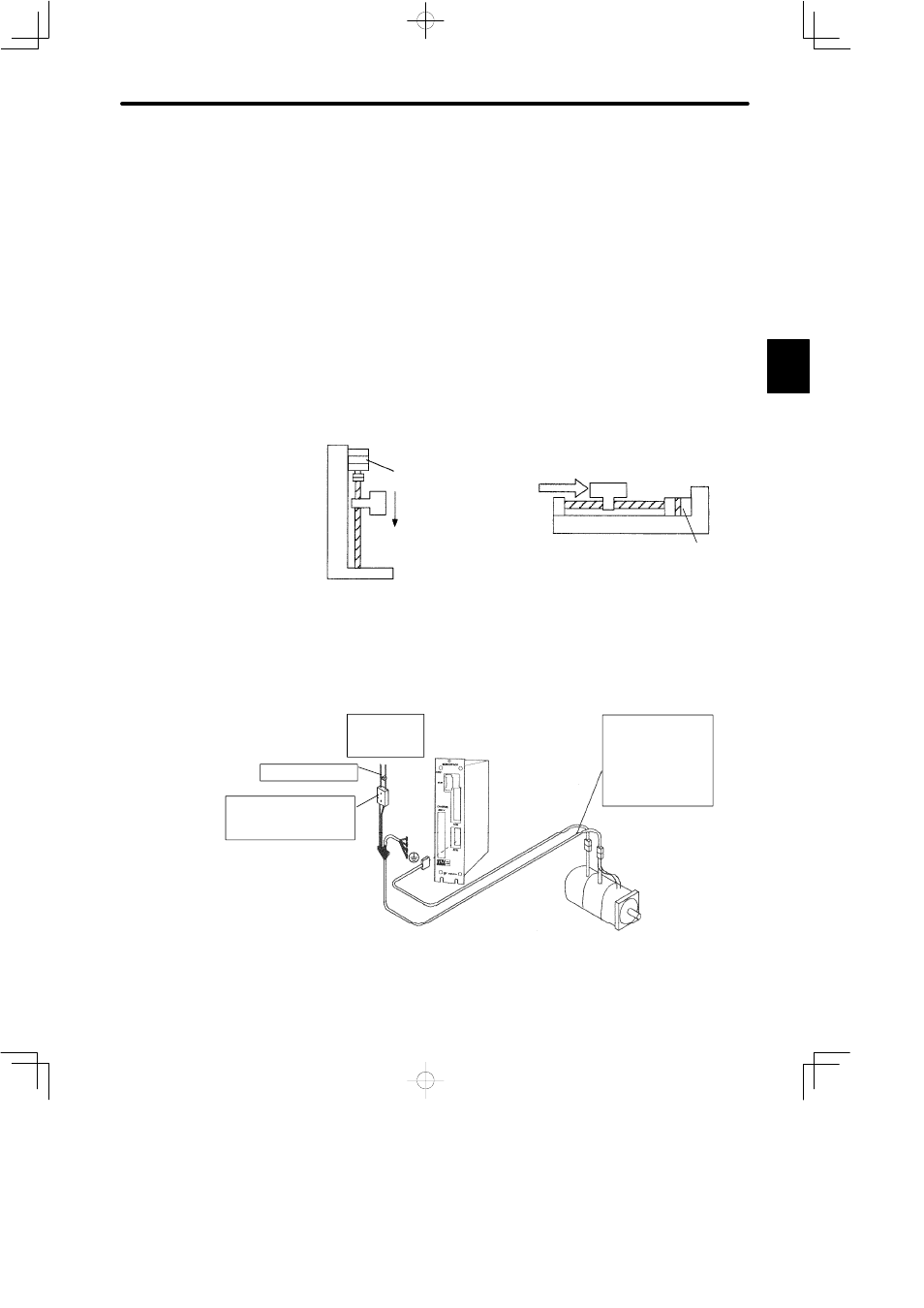
• Vertical axis
• Axis to which external force is applied
Servomotor
Holding brake
Prevents the
motor from
rotating due to
gravity
External force
Servomotor
Holding
brake
NOTE
To prevent faulty operation caused by gravity (or external force), first check that the motor
and holding brake operate normally with the motor disconnected from the machine.
Then, connect the motor to the machine and conduct a test run.
For wiring of a servomotor with a brake, refer to 3.4.4 Using Holding Brake.
Brake control relay
Brake power supply
LPSE-2H01 (200 V input)
LPDE-1H01 (100 V input)
Power supply:
single-phase
200 V or 100 V
Servopack
Cable for motor with
brake
9.8ft DP9320660-1
16.4ft DP9320660-2
32.8ft DP9320660-3
49.2ft DP9320660-4
65.6ft DP9320660-5
Servomotor with brake
U
V
W
2