Yaskawa DR2 Sigma Servo User Manual
Page 309
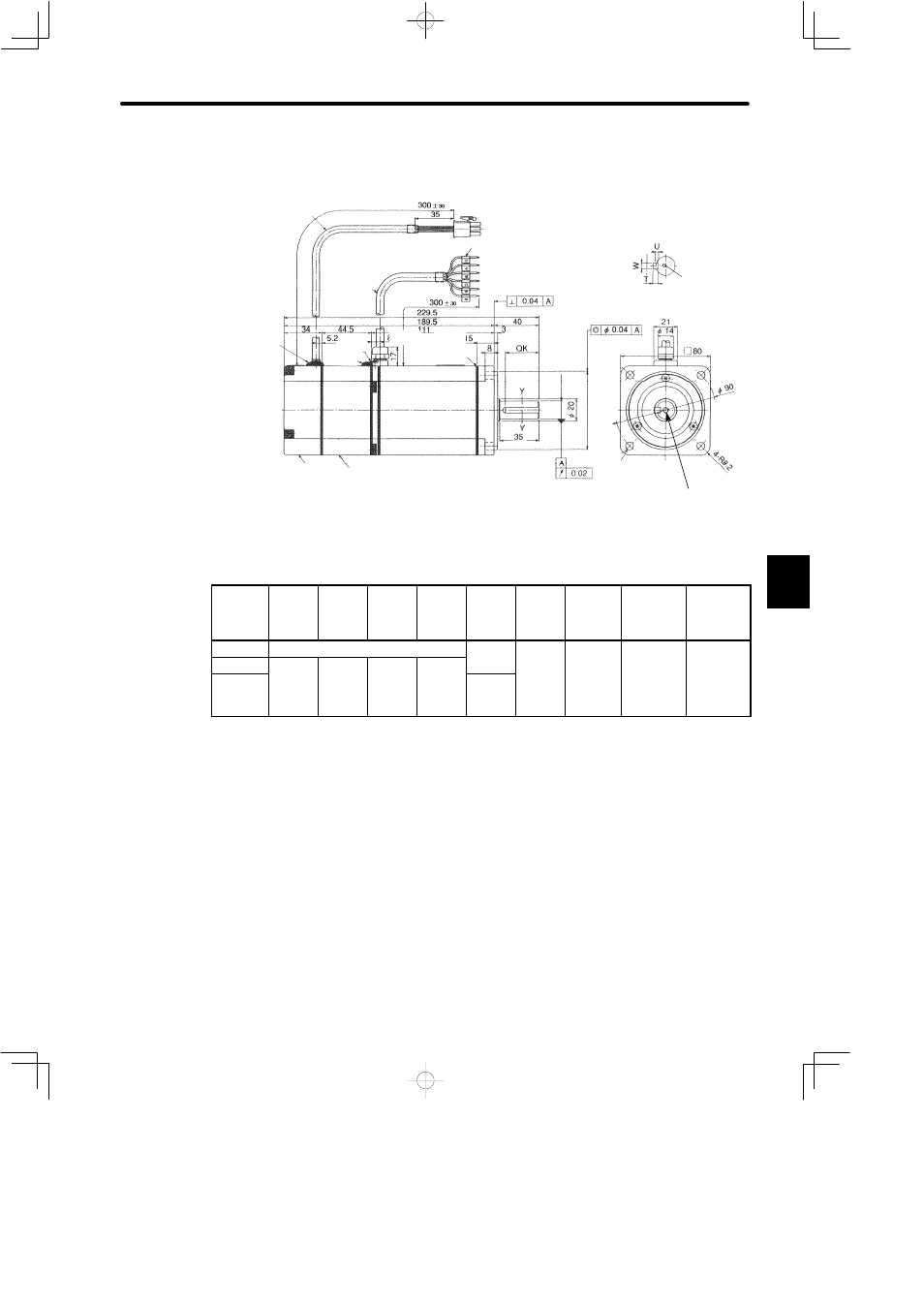
5.4 Σ-Series Dimensional Drawings
297
• 750 W (1.01 HP)
Encoder Lead
UL2854
Incremental Encoder
2048 P/R
Cross-section Y-Y
(1.34)
4-φ7 (φ0.28)
MTG Holes
Motor Lead φ7
(φ0.29)
Sealant
(0.0016)
(0.0008)
(9.04)
(1.38)
(11.81¦1.18)
(1.38)
(0.12)
(1.57)
(11.81¦1.18)
φ
16
0 -0.01
1
0.63
-0.0004
0
φ
(
)
(1.75)
(0.31)
(3.15)
(φ0.55)
(0.20)
Marked Wire
Sealant
(φ0.0016)
Sealant
φ
70
0 -0.030
2.76
-0.0012
0
φ
(
)
(4.37)
(7.46)
(0.59)
(0.83)
Holding Brake
(Deenergisation Operation)
Voltage: 90VDC, Dissipated
Current (Reference): 0.08A
Brake Holding Torque = Motor
Rated Torque
Brake Lead
(φ
0.79)
(0.31)
(φ3.54)
Shaft end screw hole
(SGM−08V316B, with
key type only)
Screw
Type
SGM-
QK
U
W
T
Screw
dimen-
sions
Output
W
(HP)
Approx.
mass
kg
(lb)
Allowable
radial
load
N (lb)
Allowable
thrust
load
N (lb)
08V312B No key
−
750
(1 01)
4.3
(9 8)
392 (88.1) 147 (33.0)
08V314B 30
(1 18)
3
(0 12)
5
(0 20)
5
(0 20)
(1.01)
(9.48)
(
)
(
)
08V316B (1.18)
(0.12)
(0.20)
(0.20)
M5,
depth 8
(0.31)
Note
1) The detector uses an incremental encoder 2048 P/R.
2) Type “V” indicates 200 V specification.
3) “08V314B” and “08V316B have a keyed shaft. The keyway complies with JIS B
1301-1976 (precision). A straight key is supplied.
4) The quoted allowable radial load is the value at a position 35 mm (1.38 in.) from the mo-
tor mounting surface.
5) The electromagnetic brake is only to hold the load in position and cannot be used to stop
the motor.
5