A.51 – Yaskawa DR2 Sigma Servo User Manual
Page 408
INSPECTION, MAINTENANCE, AND TROUBLESHOOTING
6.2.1 Troubleshooting Problems with Alarm Display cont.
396
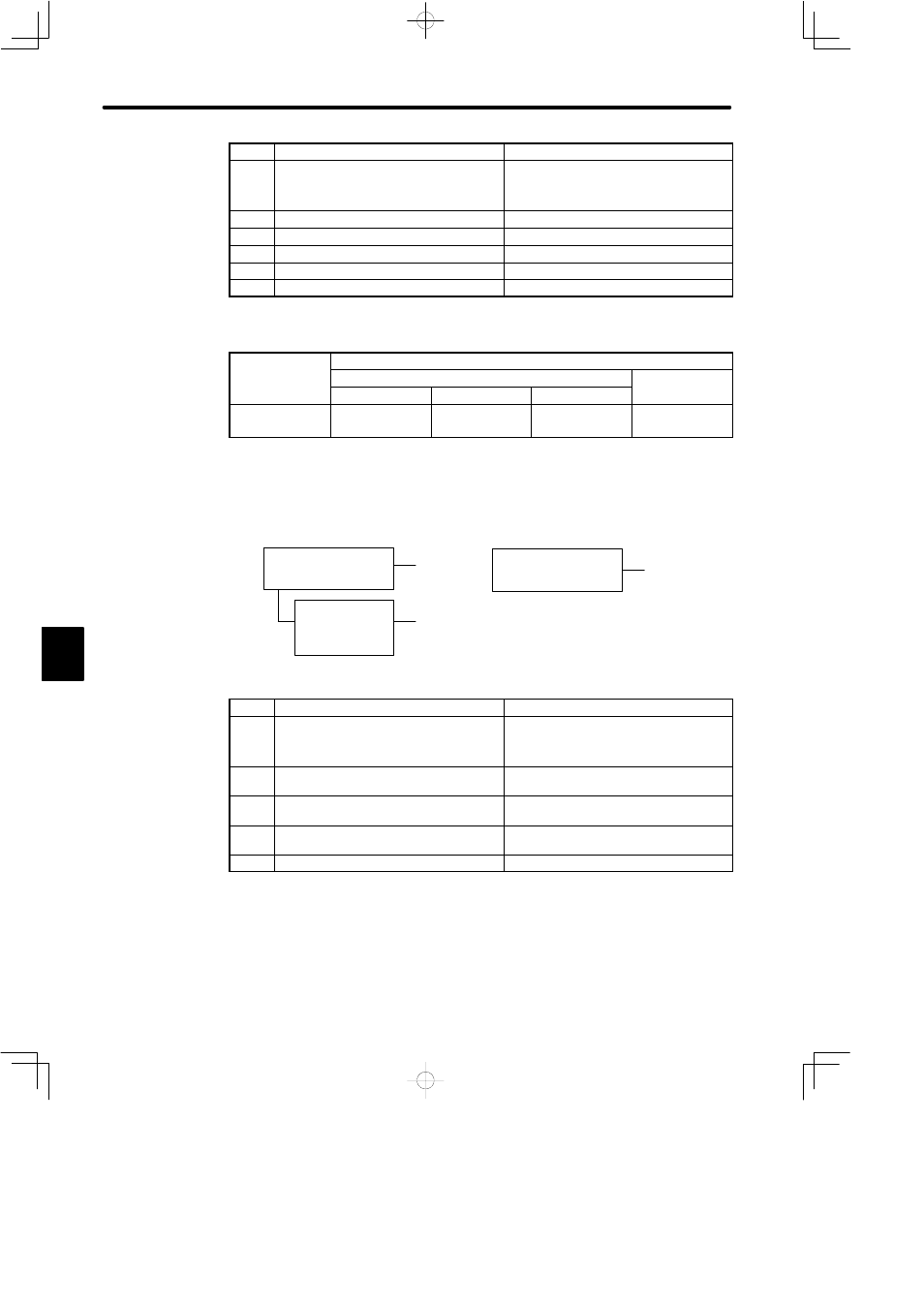
Cause
Remedy
A
Load inertia high and motor speed too high • Change operating conditions.
• Use external regenerative resistor or re-
generative unit. (Refer to 3.8.4.)
B
Load exceeds capacity of regenerative unit Change operating conditions.
C
Servomotor speed too high
Reduce motor speed.
D
Servopack defective
Replace Servopack.
E
Input voltage too high
Change input voltage to normal value.
F
Circuit board (1PWB) defective.
Replace Servopack.
D
Display and Outputs
Digital Operator
Di l
d
Alarm Output
g
p
Display and
Alarm Name
Alarm Code Output
Alarm Output
Alarm Name
ALO1
ALO2
ALO3
p
A.51
Overspeed
ON
OFF
ON
OFF
OFF: Output transistor is OFF
ON: Output transistor is ON
Status When Alarm Occurred
A
, B, C, D, E
When servo ON (S-ON)
signal turned ON
During high-speed
servomotor rotation
after reference in-
put
Alarm detected at
110% max. speed
At control power ON
E
A
, B, C, D, E
Cause
Remedy
A
• Servomotor wiring incorrect.
• Encoder wiring incorrect (disconnection,
short, power supply, etc.)
Check and correct wiring. (Check A-, B-,
C-phase pulses correct at 2CN.)
B
Incremental encoder power not supplied
from Servopack.
Use the Servopack power supply for the
encoder.
C
Noise in encoder wiring.
Separate encoder wiring from main wiring
circuits.
D
Incorrect user constant (number of encoder
pulses) setting.
Set user constant Cn-11 to the correct
number of pulses.
E
Circuit board (1PWB) defective
Replace Servopack.
6