Yaskawa DR2 Sigma Servo User Manual
Page 132
3.6 Minimizing Positioning Time
119
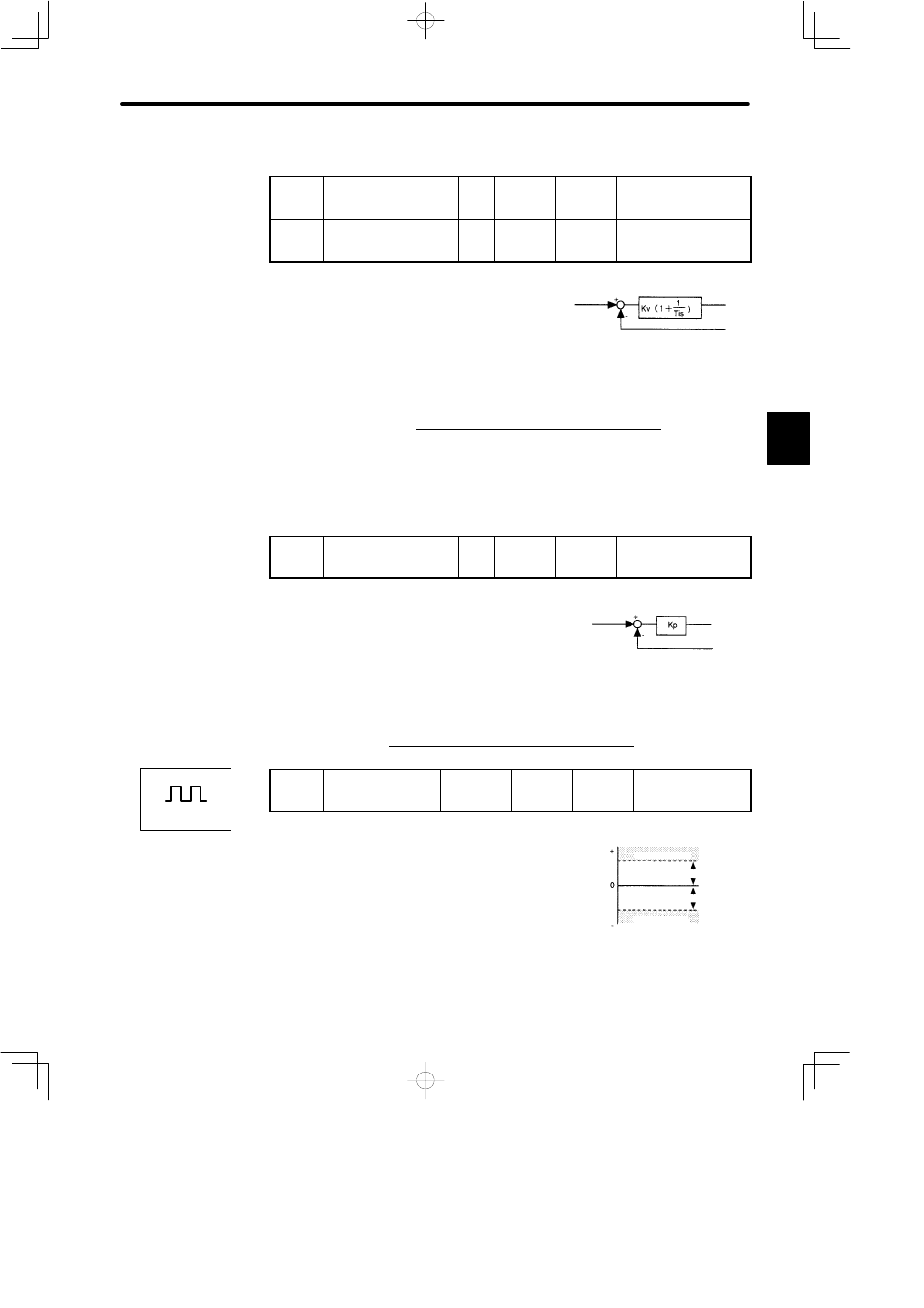
2) Set the following user constants related to speed loop as necessary.
Cn-04
LOOPHZ
Speed Loop Gain (Kv)
Unit:
Hz
Setting
Range: 1
to 2000
Factory
Setting:
80
For Speed/Torque
Control and Position
Control
Cn-05
PITIME
Speed Loop Integration
Time Constant (Ti)
Unit:
0.01
ms
Setting
Range: 2
to 10000
Factory
Setting:
2000
For Speed/Torque
Control and Position
Control
Cn-04 and Cn-05 are a speed loop gain and an in-
tegration time constant for the Servopack,
respectively.
The higher the speed loop gain value or the smaller the speed loop integration time
constant value, the higher the speed control response. There is, however, a certain limit
depending on machine characteristics.
These user constants are automatically set by the autotuning function.
The unit of speed loop integration time constant Cn-05 (Ti) can be changed to
0.01 ms.
3) Set the following user constants related to position loop as necessary.
Cn-1A
POSGN
Position Loop Gain (Kp)
Unit:
1/s
Setting
Range: 1
to 500
Factory
Setting:
40
For Position Control
Only
This user constant is a position loop gain for the
Servopack.
Increasing the position loop gain value provides
position control with higher response and less
error. However, there is a certain limit depending
on machine characteristics.
This user constant is automatically set by the autotuning function.
Cn-1E
OVERLV
Overflow
Unit: 256
References
Setting
Range: 1
to 32767
Factory
Setting:
1024
For Position Control
Only
This user constant is for position control only.
Set in this user constant the error pulse level at
which a position error pulse overflow alarm (alarm
A.31) is detected.
If the machine permits only a small position loop gain value to be set in Cn-1A, an over-
flow alarm may arise during high-speed operation. In this case, increase the value set in
this user constant to suppress alarm detection.
3
Speed
reference
Speed loop gain
Speed feedback
Position
reference
Position loop gain
Position feedback
Positions
Normal control
Error pulse
Cn-1E
OVERLV
(Alarm A.31)
(Alarm A.31)