3 using zero-clamp, Input p-con 1cn-41 – Yaskawa DR2 Sigma Servo User Manual
Page 122
3.4 Setting Stop Mode
109
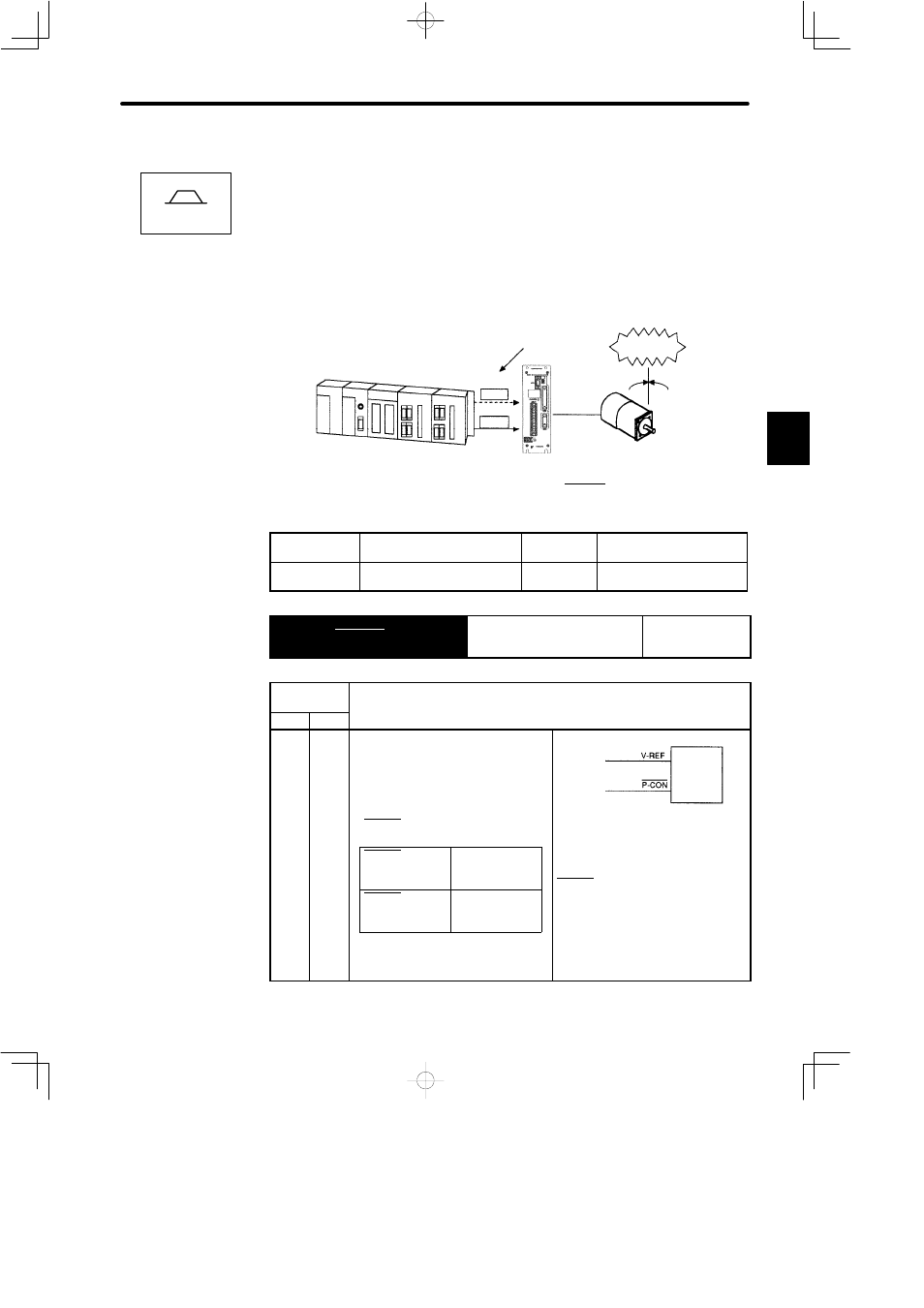
3.4.3 Using Zero-Clamp
1) The zero-clamp function is used for a system in which the host controller does not form a
position loop by speed reference input.
In other words, this function is used to cause the motor to stop and enter a servo locked
status when the input voltage of speed reference V-REF is not 0 V. When the zero-clamp
function is turned ON, an internal position loop is temporarily formed, causing the motor
to be clamped within one pulse. Even if the motor is forcibly rotated by external force, it
returns to the zero-clamp position.
Host controller
Speed reference
Speed reference less than
Cn-29 setting is ignored
Stops
instantaneously
V-REF
P-CON
2) Set the following memory switch so that input signal P-CON can be used to enable or
disable the zero-clamp function.
Cn-01Bit A
Control Mode Selection
Factory
Setting:0
For Speed/Torque Control
Only
Cn-01Bit B
Control Mode Selection
Factory
Setting:0
For Speed/Torque Control
Only
→ Input P-CON 1CN-41
Proportional Control, etc.
For Speed/Torque
Control and
Position Control
Cn-01
Setting
Control Mode
Bit B Bit A
Control Mode
Zero-clamp Speed Control
This speed control allows the
zero-clamp function to be set when
the motor stops.
D
A speed reference is input from
V-REF (1CN-5).
D
P-CON (1CN-41) is used to turn the
zero-clamp function ON or OFF.
Servopack
Speed reference
Zero-clamp
(1CN-5)
(1CN-41)
0
1
P-CON
(1CN-41) is
open (OFF)
Turns
zero-clamp
function OFF
Zero-clamp is performed when the
following two conditions are met:
P-CON signal is closed.
P-CON
(1CN-41) is
closed (ON)
Turns
zero-clamp
function ON
P-CON signal is closed.
Motor speed is below the value
set in Cn-29 (ZCLVL).
D
Torque reference input T-REF
(1CN-9) cannot be used.
3
Speed/Torque