4 using holding brake – Yaskawa DR2 Sigma Servo User Manual
Page 123
APPLICATIONS OF Σ-SERIES PRODUCTS
3.4.4 Using Holding Brake
110
3) Set in the following user constant the motor speed level at which zero-clamp is to be per-
formed:
Cn-29
ZCLVL Zero-Clamp
Level
Unit:
r/min
Setting Range:
0 to Maximum
Speed
Factory
Setting:
10
For Speed Control
Only
If zero-clamp speed control is selected, set the motor speed level at which zero-clamp is
to be performed.
Conditions for Zero-clamp
Zero-clamp is performed when all the following conditions are met:
a) Zero-clamp speed control is selected.(Bits A and B of memory switch Cn-01 are set to
1 and 0, respectively.)
b) P-CON (1CN-41) is turned ON (0 V).
c) Motor speed drops below the preset value.
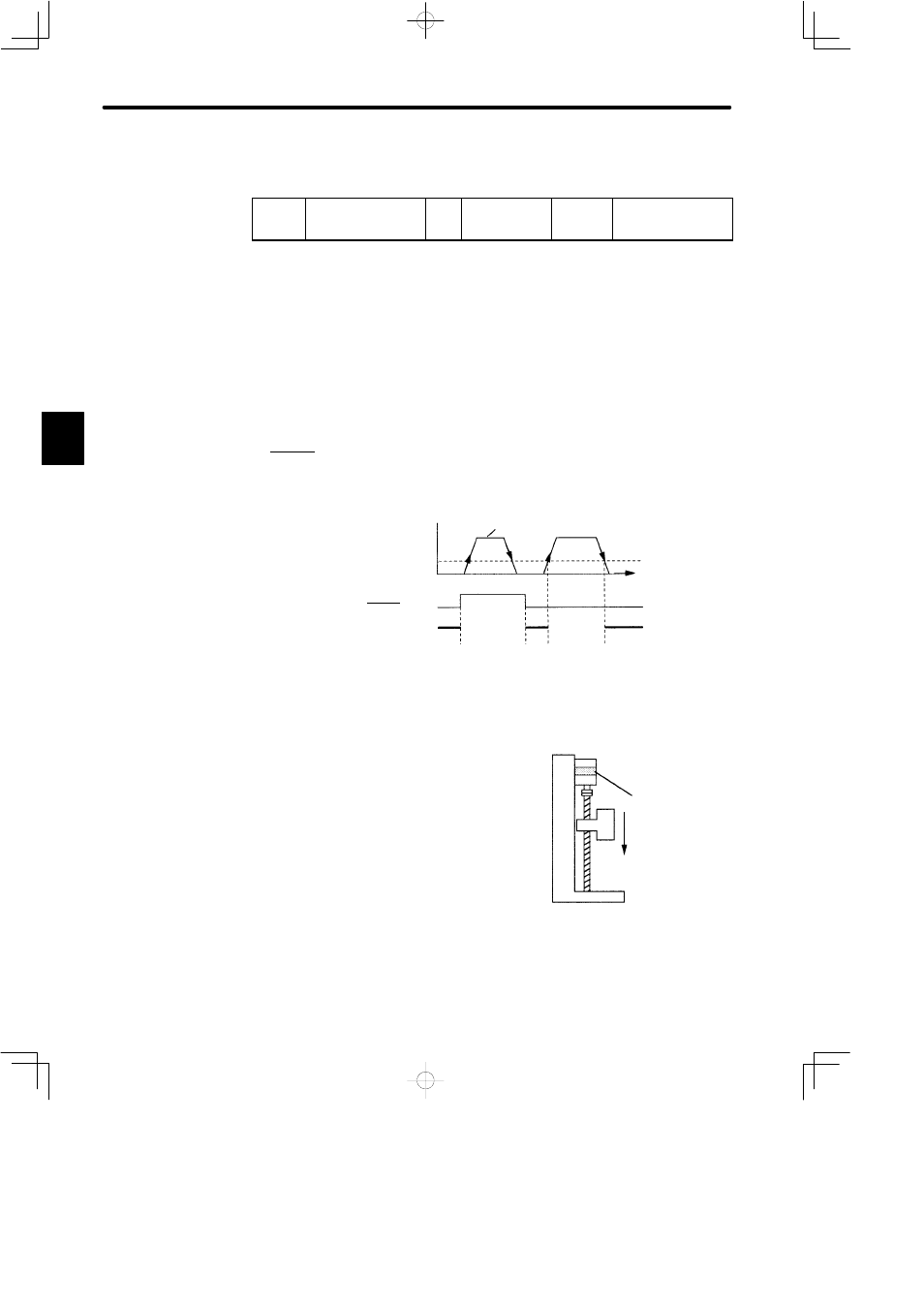
Speed
V-REF speed reference
Preset value for
zero-clamp
P-CON input
Zero-clamp being
performed
Open (OFF)
Closed (ON)
Time
3.4.4 Using Holding Brake
1) Outline
Holding brake is useful when a servo drive is used
to control a vertical axis. A servomotor with brake
prevents the movable part from dropping due to
gravitation when the system power is turned OFF.
NOTE
The built-in brake in Servomotor with brake is a de-energization operation type, which is
used for holding purposes only and cannot be used for braking purposes. Use the holding
brake only to retain a stopped motor. Brake torque is more than 100% of the rated motor
torque.
3
Servomotor
Holding brake
Prevents movable
part from shifting
due to gravitation
when power is
turned OFF