Yaskawa DR2 Sigma Servo User Manual
Page 106
3.2 Setting User Constants According to Host Controller
93
Cn-01
Setting
Control Mode
Bit B Bit A
Control Mode
For Speed Control when P-CON is ON:
Values set in bit F of user constant Cn-01 and bit F of Cn-02 determine the
following:
User
Constant
Speed
Reference
I
t
Torque
Reference
I
t
R
k
Cn-01 Cn-02
Input
(V-REF)
Input
(T-REF)
Remarks
Bit F
Bit F
(V-REF)
(1CN-5,-6)
(T-REF)
(1CN-9,-10)
Speed control
0
0
Speed
reference
Cannot be
used
1
1
1
Speed control with torque
feed-forward
Any value can be set in bit F
of Cn-02 (0 and 1 have the
same effect).
F d t il
f
d
t l
1
−−−−
Speed
reference
Torque
feed-forward
For details of speed control
with torque feed-forward,
refer to 3.2.8 Using Torque
Feed-forward Function.
0
1
Speed control with torque
limit by analog voltage
reference
For details of speed control
with torque limit by analog
voltage reference, refer to
3 2 9 Using Torque
0
1
Speed
reference
Torque limit
value
3.2.9 Using Torque
Restriction by Analog Voltage
Reference.
0
0
Speed control
(Standard setting)
0
1
Zero-clamp speed control (Refer to 3.4.3.)
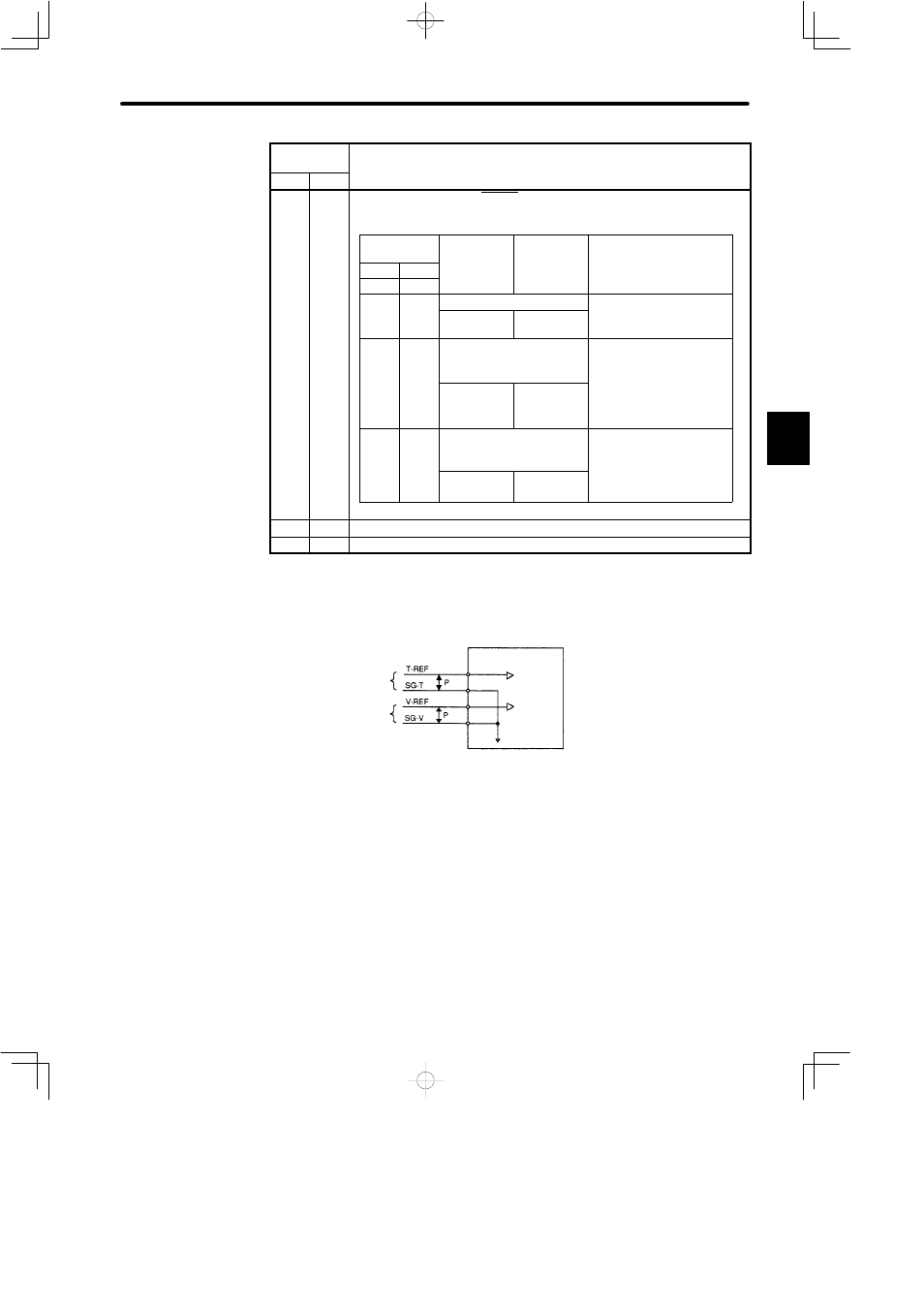
3) The following input signals perform torque control.
Torque reference input
(Analog voltage input)
Speed reference input
(Analog voltage input)
Servopack
Torque
reference
Speed
reference
↕P: Represents twisted-pair cables
1CN-9
1CN-10
1CN-5
1CN-6
3