Yaskawa DR2 Sigma Servo User Manual
Page 68
3.1 Setting User Constants According to Machine Characteristics
55
3) Use the following user constants (memory switch) to specify whether input signals for
overtravel are to be used.
Cn-01 Bit 2
Use of P-OT Input Signal
Factory
Setting: 0
For Speed/Torque Control
and Position Control
Cn-01 Bit 3
Use of N-OT Input Signal
Factory
Setting: 0
For Speed/Torque Control
and Position Control
Specifies whether the P-OT input signal for pro-
hibiting forward rotation at overtravel (1CN-42) is
to be used and whether the N-OT input signal for
prohibiting
reverse
rotation
at
overtravel
(1CN-43) is to be used.
Specifies “1” when external short-circuit wiring is
to be omitted.
Bit
Setting
Meaning
Bit 2
0
Uses the P-OT input signal for prohibiting forward rotation. (Forward
rotation is prohibited when 1CN-16 is open. Forward rotation is allowed
when 1CN-42 is at 0 V.)
Bit 2
1
Does not use the P-OT input signal for prohibiting forward rotation.
(Forward rotation is always allowed. This has the same effect as shorting
1CN-42 to 0 V.)
Bit 3
0
Uses the N-OT input signal for prohibiting reverse rotation. (Reverse
rotation is prohibited when 1CN-17 is open. Reverse rotation is allowed
when 1CN-43 is at 0 V.)
Bit 3
1
Does not use the N-OT input signal for prohibiting reverse rotation.
(Reverse rotation is always allowed. This has the same effect as shorting
1CN-43 to 0 V.)
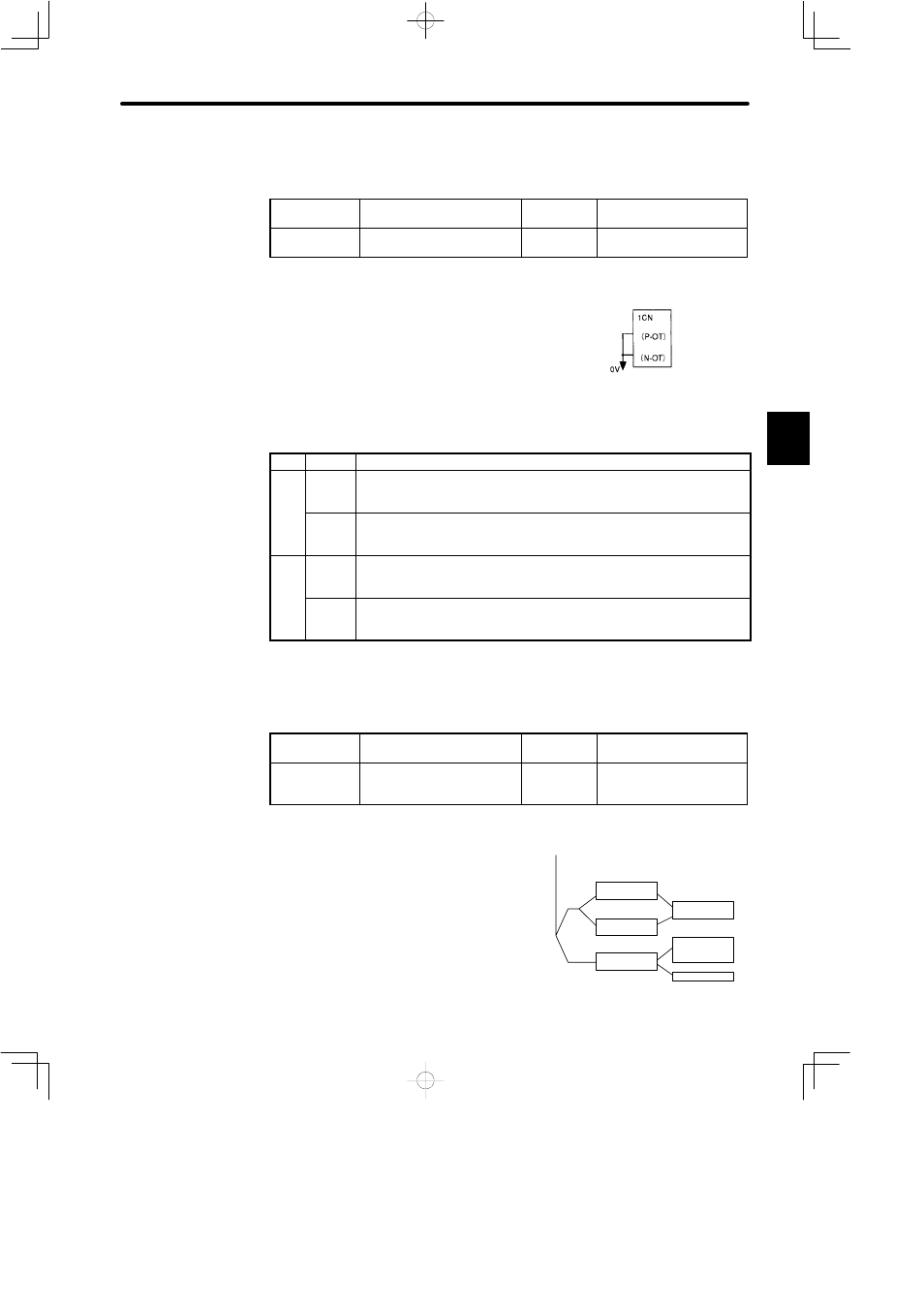
4) If the P-OT and N-OT input signals are used, set the following user constants to specify
how to stop the motor.
Cn-01 Bit 8
How to Stop Motor at
Overtravel
Factory
Setting: 0
For Speed Control and
Position Control
Cn-01 Bit 9
Operation to be Performed
when Motor Stops after
Overtravel
Factory
Setting: 0
For Speed Control and
Position Control
• Inputs signal for prohibiting forward rotation
(P-OT, 1CN-42)
• Inputs signal for prohibiting reverse rotation
(N-OT, 1CN-43)
Specify how to stop the motor when either of the
above signals is input.
3
Servopack
The short-circuit wiring shown in the
figure can be omitted when P-OT and
N-OT are not used.
-42
-43
Overtravel
Stop mode
After stop
Bit 6
Bit 8
Bit 9
0
0
1
1
Releasing
dynamic brake
Releasing
dynamic brake
Servo OFF
Zero-clamp
Stop by
dynamic brake
Coasting to a
stop
Deceleration
stop
0
1