Yaskawa DR2 Sigma Servo User Manual
Page 80
3.2 Setting User Constants According to Host Controller
67
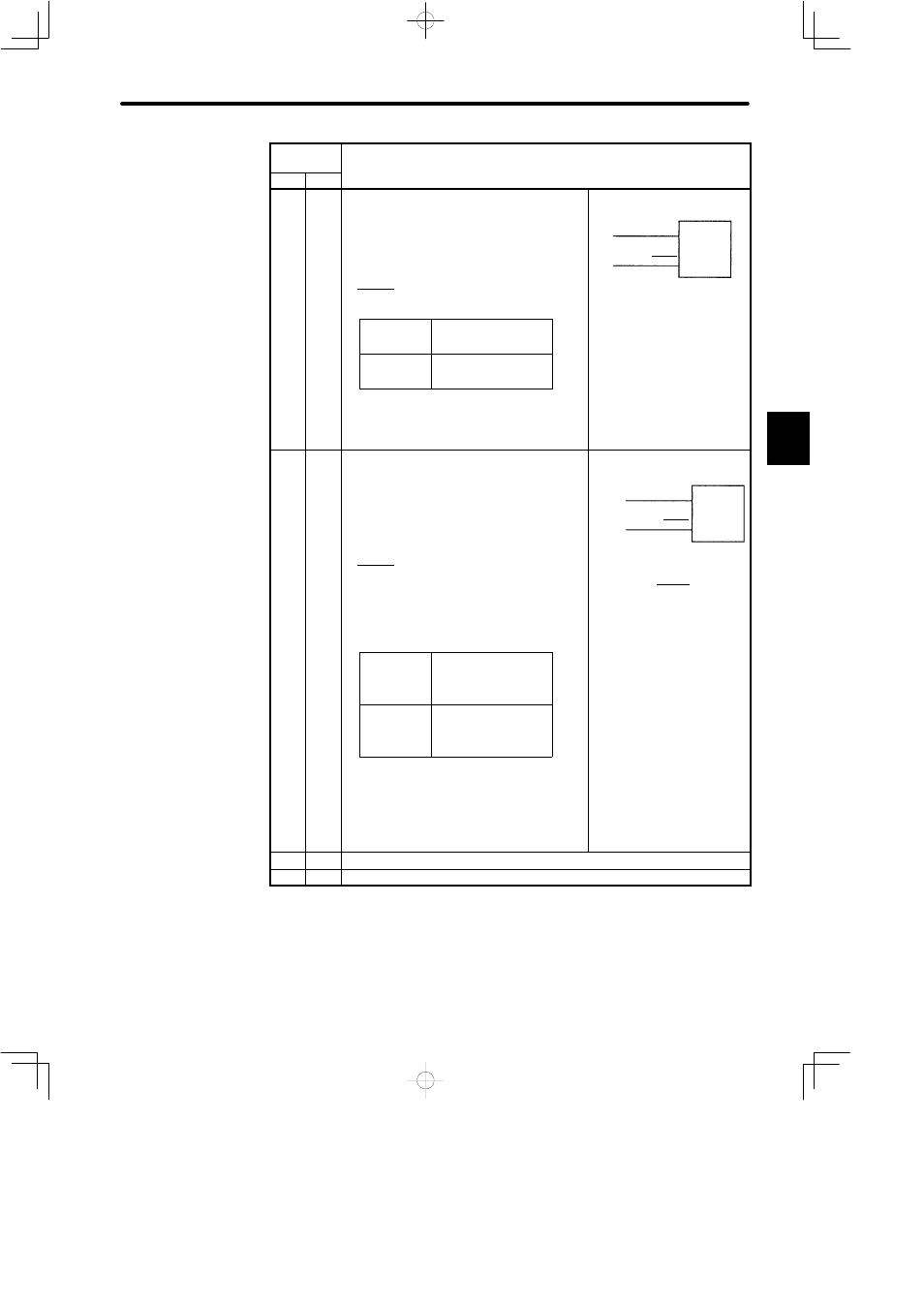
Cn-01
Setting
Control Mode
Bit B Bit A
Control Mode
0
0
Speed Control
This is normal speed control.
D
Speed reference is input from V-REF
(1CN-5).
D
P-CON (1CN-41) signal is used to switch
between P control and PI control.
DR2 Servopack
Speed
reference
P/PI
changeover
V-REF
(1CN-5)
P-CON
(1CN-41)
0
0
1CN-41 is
open
PI control
1CN-41 is
at 0 V
P control
D
Torque reference input T-REF (1CN-9)
cannot be used.
0
1
Zero-clamp Speed Control
This speed control allows the zero-clamp
function to be set when the motor stops.
D
Speed reference is input from V-REF
(1CN-5).
D
P-CON (1CN-41) signal is used to turn the
zero-clamp function ON or OFF.
Zero-clamp
Zero-clamp is performed when
the following two conditions
are met:
Condition 1: P-CON is turned
ON.
Condition 2: Motor speed
drops below the preset value.
Preset value: Cn-29 (ZCLVL)
DR2 Servopack
Speed
reference
V-REF
(1CN-5)
P-CON
(1CN-41)
0
1
1CN-41 is
open
Turns zero-clamp
function OFF
1CN-41 is
at 0 V
Turns zero-clamp
function ON
D
Torque reference input T-REF (1CN-9)
cannot be used.
1
0
Torque control I
1
1
Torque control II
For torque control, refer to 3.2.7 Using Torque Control.
3