Yaskawa DR2 Sigma Servo User Manual
Page 491
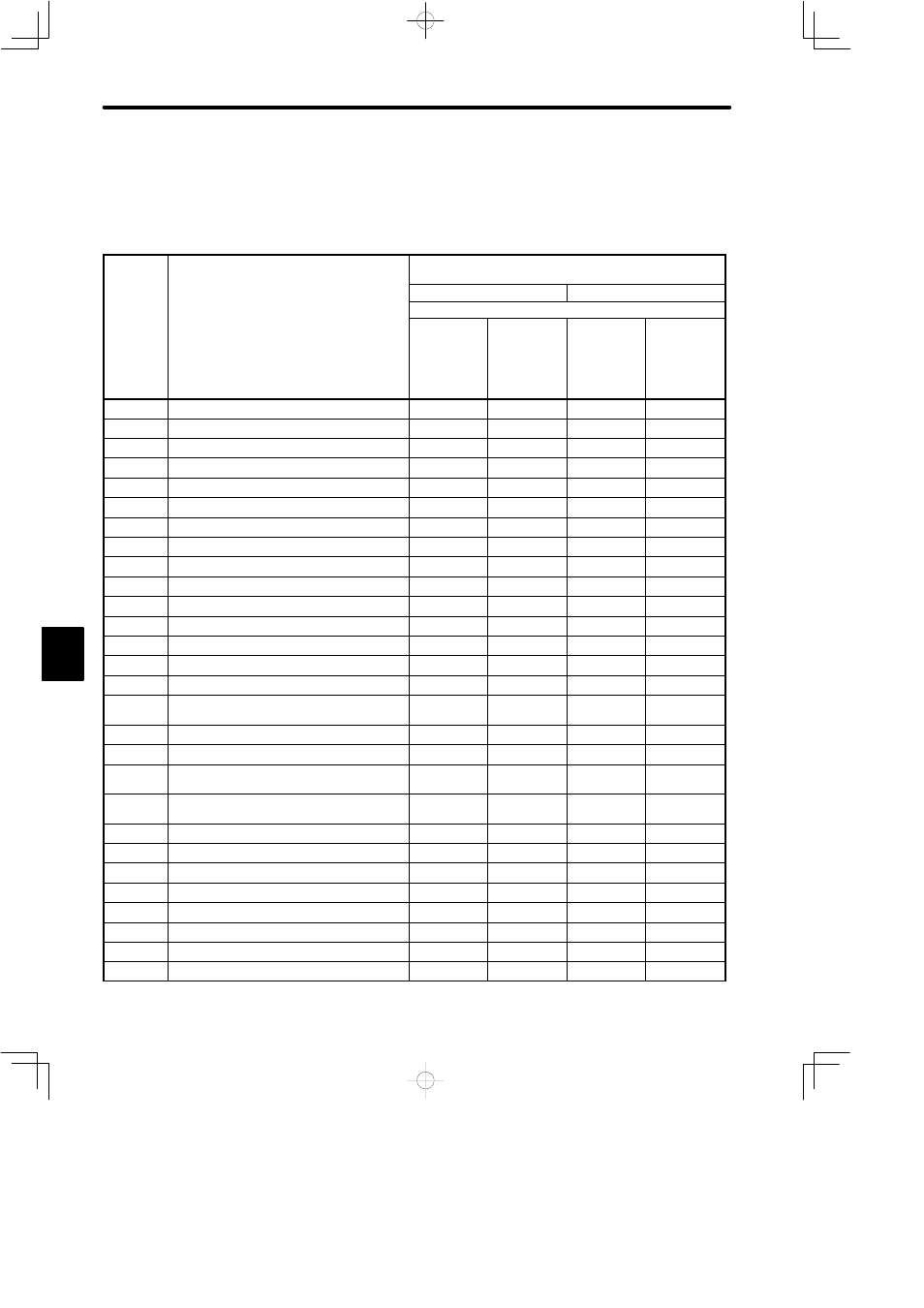
RELATIONSHIP BETWEEN REFERENCE FORMS AND USER CONSTANTS
482
Relationship between Reference Forms and User Constants (1)
f
: Related to or possibly related to
× : Not related at all
User
Constant
User Constant Name
Speed/Torque Control Mode
(Cn-02 Bit B = 0)
Co s a
No.
Speed Control
Torque Control
Cn-02 Bit 2 = 0
Speed
Control
(Standard)
Cn-01
Bit A = 0
Bit B = 0
Speed
Control with
Zero-clamp
Function
Bit A = 1
Bit B = 0
Torque
Control I
Bit A = 0
Bit B = 1
Torque
Control II
Bit A = 1
Bit B = 1
Cn-03
Speed reference gain
f
f
×
f
Cn-04
Speed loop gain
f
f
f
f
Cn-05
Speed loop integration time constant
f
f
×
×
Cn-06
Emergency stop torque
f
f
×
f
Cn-07
Soft start time (acceleration)
f
f
×
f
Cn-08
Forward torque limit
f
f
f
f
Cn-09
Reverse torque limit
f
f
f
f
Cn-0A
Encoder pulse dividing ratio
f
f
f
f
Cn-0B
Zero-speed level
f
f
f
f
Cn-0C
Mode switch (torque reference)
f
f
×
×
Cn-0D
Mode switch (speed reference)
f
f
×
×
Cn-0E
Mode switch (acceleration)
f
f
×
×
Cn-0F
Mode switch (error pulse)
×
×
×
×
Cn-10
JOG speed
f
f
f
f
Cn-11
Number of encoder pulses
f
f
f
f
Cn-12
Time delay from brake reference until servo
OFF
f
f
f
f
Cn-13
Torque reference gain
f
f
f
f
Cn-14
Speed limit for torque control I
f
f
f
×
Cn-15
Speed level for brake reference output during
motor operation
f
f
f
f
Cn-16
Output timing of brake reference during
motor operation
f
f
f
f
Cn-17
Torque reference filter time constant
f
f
f
f
Cn-18
Forward external torque limit
f
f
f
f
Cn-19
Reverse external torque limit
f
f
f
f
Cn-1A
Position loop gain
×
f
×
×
Cn-1B
Position complete range
×
×
×
×
Cn-1C
Bias
×
×
×
×
Cn-1D
Feed forward
×
×
×
×
Cn-1E
Overflow
×
×
×
×
F