Yaskawa DR2 Sigma Servo User Manual
Page 91
APPLICATIONS OF Σ-SERIES PRODUCTS
3.2.3 Using Encoder Output cont.
78
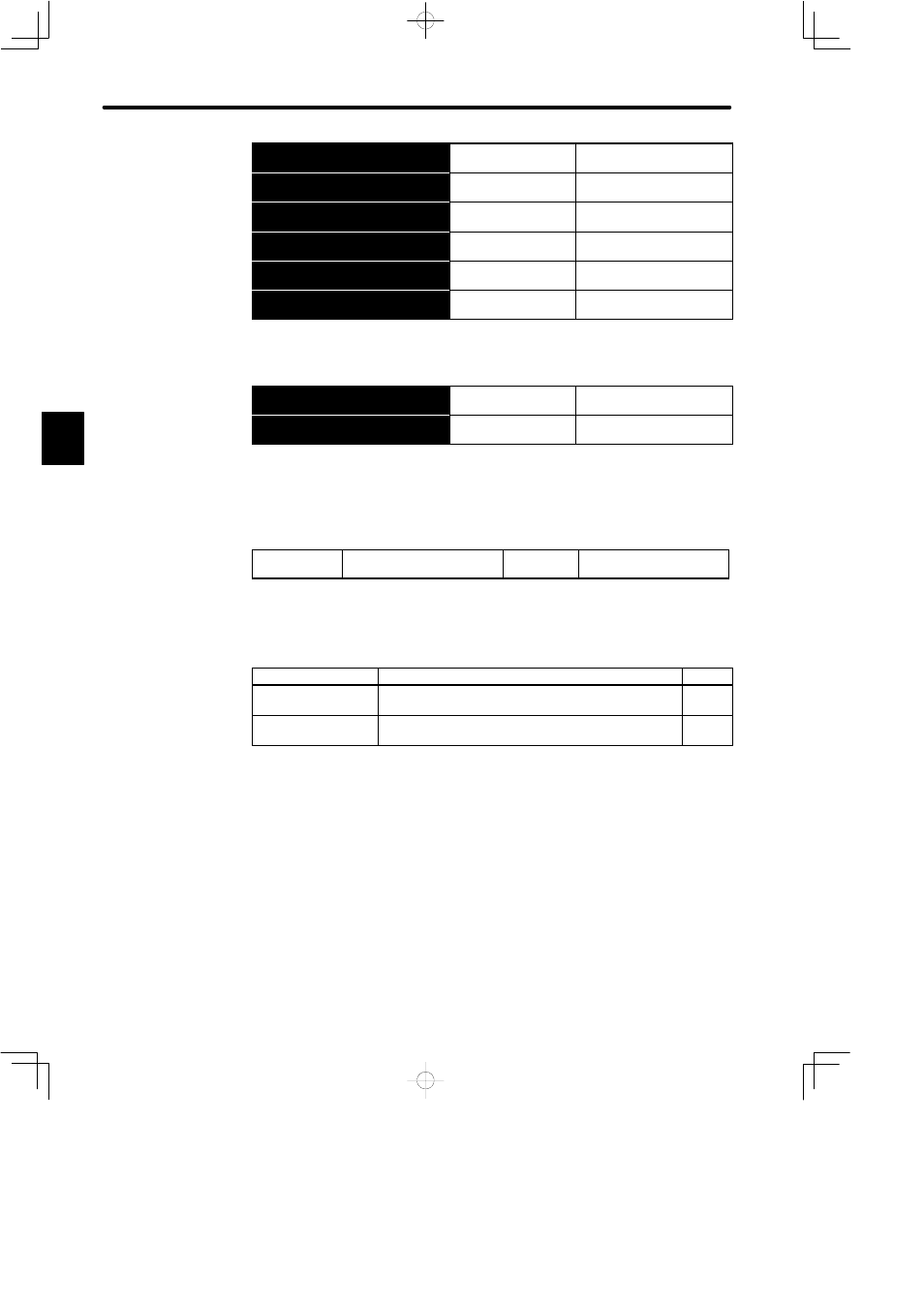
→ Input SEN 1CN-4
SEN Signal Input
For Speed/Torque Control
and Position Control
→ Input 0SEN 1CN-2
SEN Signal Input
For Speed/Torque Control
and Position Control
Output → PSO 1CN-48
Encoder Output
Phase-S
For Speed/Torque Control
and Position Control
Output →
£
PSO 1CN-49
Encoder Output
Phase-S
For Speed/Torque Control
and Position Control
→ Input BAT¨
1CN-21
Battery (+)
For Speed/Torque Control
and Position Control
→ Input BAT©
1CN-22
Battery (−)
For Speed/Torque Control
and Position Control
Use these signals (SEN to BAT©) for absolute encoders. For details, refer to 3.8.5 Using
an Absolute Encoder.
Output → SG 1CN-1
Signal Ground for
Encoder Output
For Speed/Torque Control
and Position Control
Output → FG 1CN-50
Frame Ground
For Speed/Torque Control
and Position Control
SG: Connect to 0 V on the host controller.
FG: Connect to the cable shielded wire.
3) Use the following memory switch to specify the type of the encoder to be used.
Cn-02 Bit 9
Encoder Type Selection
Factory
Setting: 0
For Speed/Torque Control
and Position Control
Sets the encoder type according to the servomotor type as shown in the table.
After changing the memory switch setting, always turn the power OFF, then ON.
Motor Type
Encoder Type
Setting
SGM-jjj31j
SGMP-jjj31j
Incremental encoder
0
SGM-jjjW1j
SGMP-jjjW1j
Absolute encoder
1
3