Yaskawa DR2 Sigma Servo User Manual
Page 73
APPLICATIONS OF Σ-SERIES PRODUCTS
3.1.3 Restricting Torque cont.
60
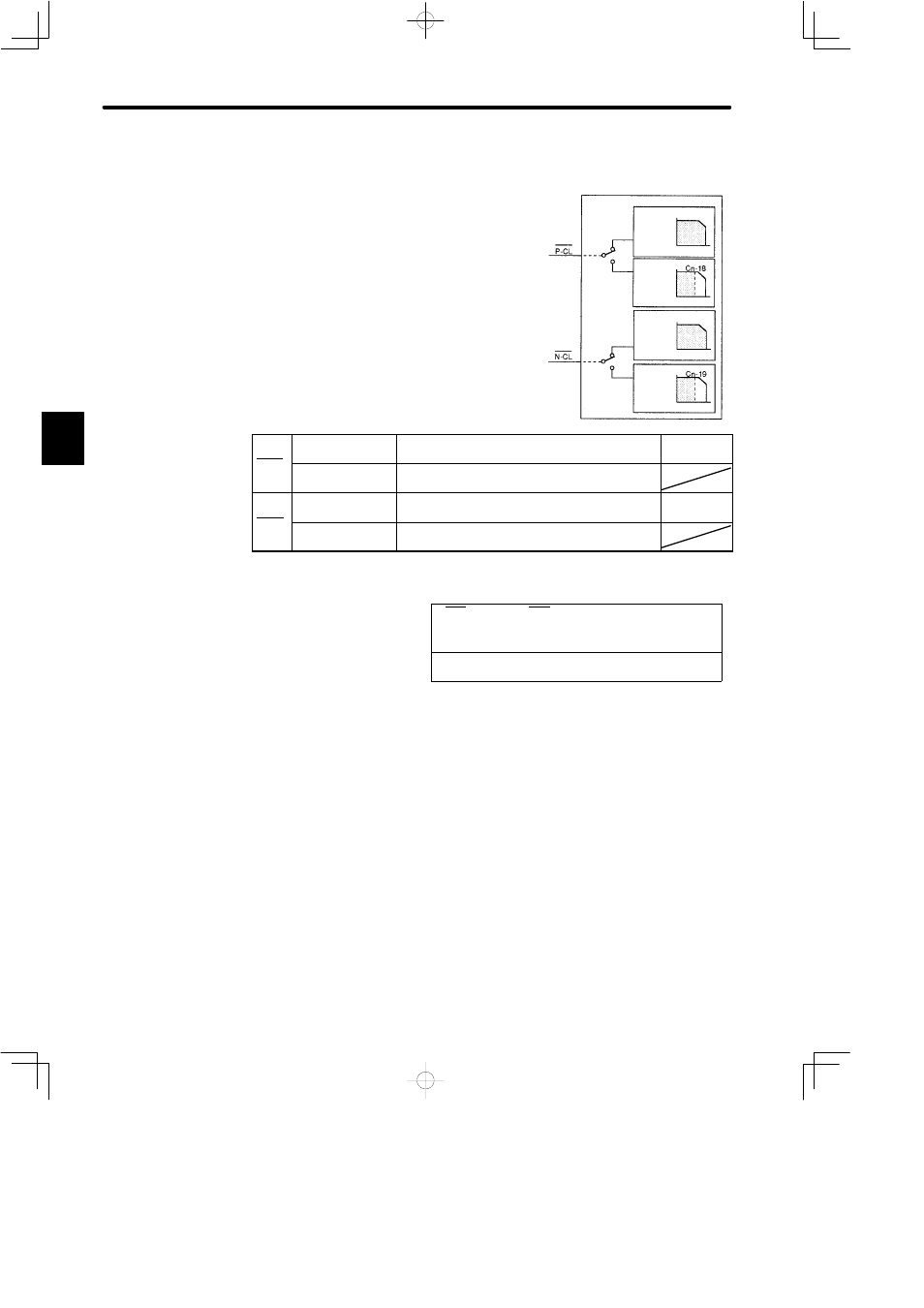
3) How to Set Level 2: External Torque Limit
First, use a contact input signal to make the torque
(current) limit value set in the user constant valid.
Torque limit can be set separately for forward and
reverse rotation.
To use this function, always set bit 2 of memory
switch Cn-02 to 0 (standard setting). The contact
input speed control function cannot be used.
P CL
ON: 1CN-45 is at
low level.
Torque restriction applies during forward rotation.
Limit value:
Cn-18
P-CL
OFF: 1CN-45 is at
high level.
Torque restriction does not apply during forward
rotation.
N CL
ON: 1CN-46 is at
low level.
Torque restriction applies during reverse rotation.
Limit value:
Cn-19
N-CL
OFF: 1CN-46 is at
high level.
Torque restriction does not apply during reverse
rotation.
Output Signal for Torque Restriction Function
This torque restriction
function outputs the signal
shown on the right.
•
CLT+ (1CN-25), CLT- (1CN-26)
•
Status indication mode bit data
•
Monitor mode Un-05 bit 4
User Constant Setting:
Memory switch Cn-01 bit 4 = 0
Examples of Use:
D
Forced stopping
D
Holding workpiece by robot
3
Servopack
Forward
rotation
Without
torque limit
Speed
Torque
With
torque limit
Reverse
rotation
Speed
Torque
Speed
Torque
Speed
Torque
Without
torque limit
With
torque limit
1CN-45
1CN-46