Yaskawa DR2 Sigma Servo User Manual
Page 125
APPLICATIONS OF Σ-SERIES PRODUCTS
3.4.4 Using Holding Brake cont.
112
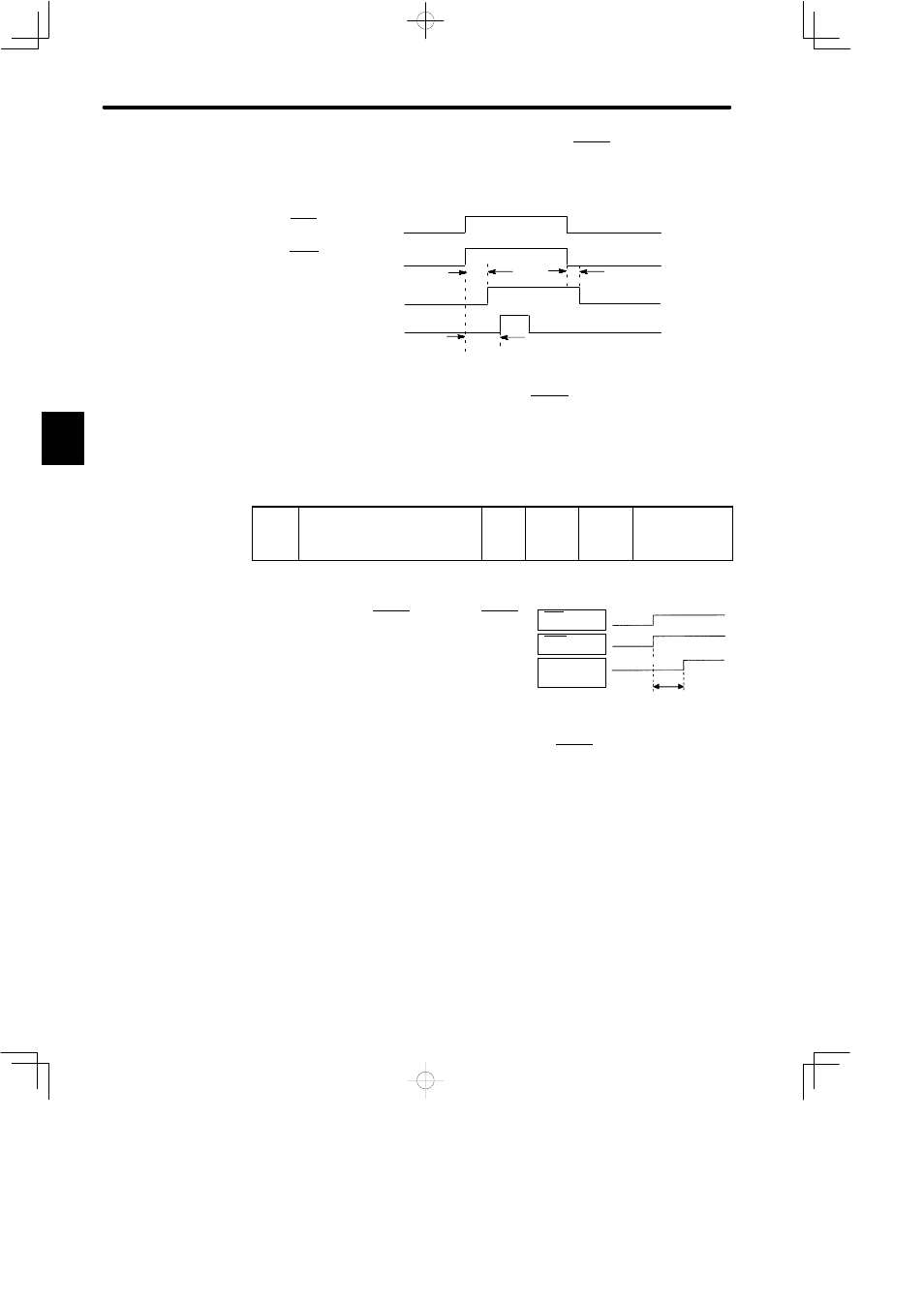
3) Between the brake is released and applied by brake power (TGON+) ON/OFF, time delay
occurs as follows:
OFF
ON
OFF
OFF
ON
OFF
Apply
Apply
Release
S-ON Input
(1CN-40)
TGON+ Output
(Brake Power Supply)
(1CN-27)
Brake
Speed Reference
200ms min.
180ms max.
100ms max.
Min. 200ms is required between brake power ON (TGON+) and speed reference input.
As for the brake holding timing at servo OFF, refer to 4) and 5) shown below.
4) If the machine moves slightly due to gravity when the brake is applied, set the following
user constant to adjust brake ON (brake holding) timing:
Cn-12 BRKTIM
Time delay from the
time a brake signal is
output until servo OFF
status occurs
Unit:
10 ms
Setting
Range:
0 to 50
Factory
Setting:
0
For
Speed/Torque
Control and
Position Control
This user constant is used to set output timing of
brake control signals TGON+ (1CN-27), TGON-
(1CN-28) and servo OFF operation (motor output
stop) when SGM/SGMP Servomotor with brake is
used.
This user constant is not available for alarm oc-
currence and main power OFF.
With the standard setting, the servo is turned OFF when TGON+ signal (brake operation)
is output. The machine may move slightly due to gravitation. This movement depends on
machine configuration and brake characteristics. If this happens, use this user constant
to delay servo OFF timing to prevent the machine from moving.
Set in this constant the brake ON timing used when the motor is in stopped status.
For brake ON timing during motor operation, use Cn-15 and Cn-16.
3
Brake Timing when Motor is in Stopped Status
S-ON input
(1CN-40)
TGON+ output
(1CN-27)
Servo ON/OFF
operation (motor
ON/OFF status)
Servo ON
Release
brake
Servo OFF
Apply brake
BRKTIM
Motor is
OFF
Motor is ON