Yaskawa MotionSuite Series Machine Controller Software Manual User Manual
Page 192
MotionSuite™ Series Machine Controller Software Manual
Chapter 7: System Data Definition
7-19
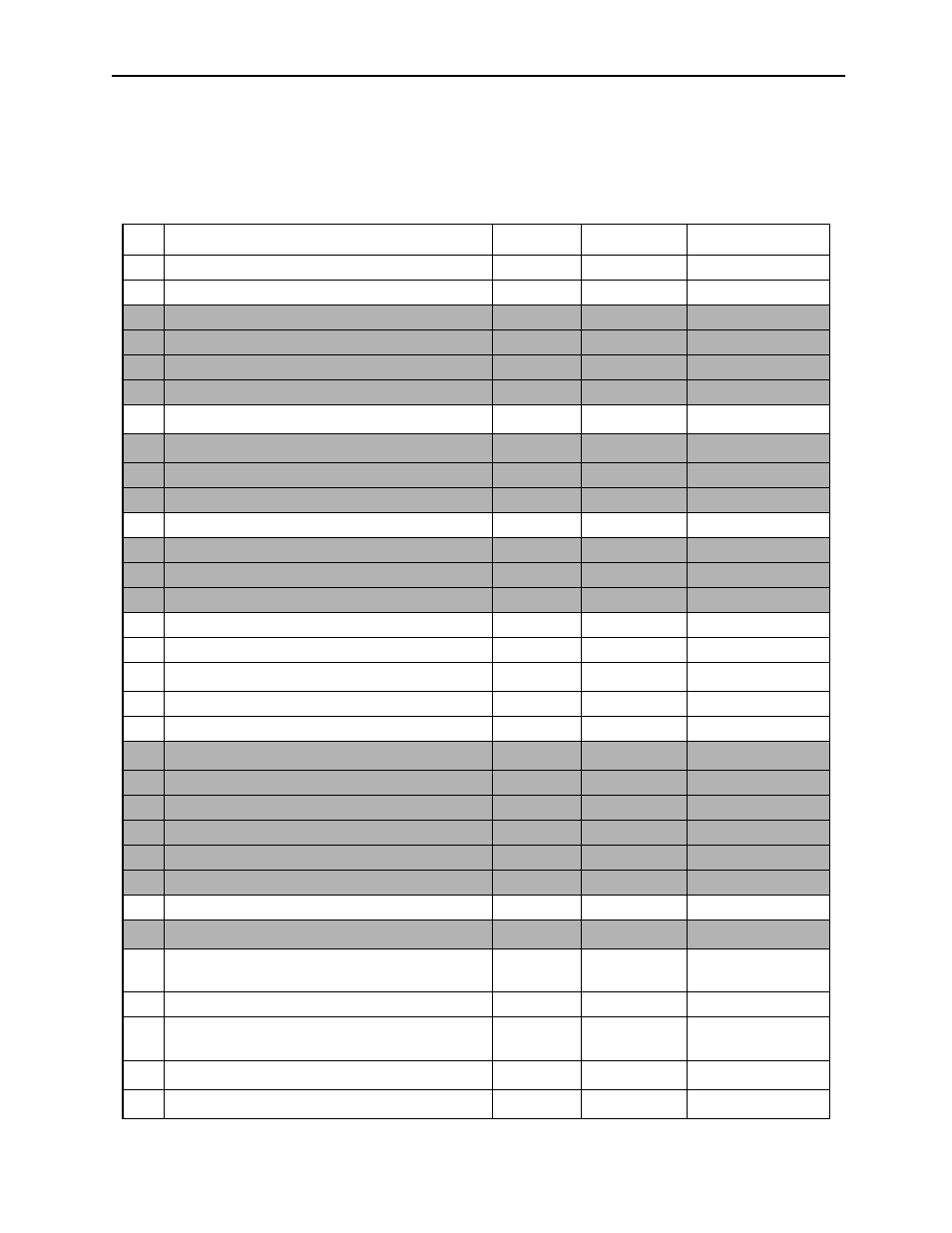
5. Set Data
Input the parameter value. The set data of the various parameters is shown in
Table 7. The set data of the shaded items cannot be changed.
Table 7: Set-up Parameter Data
No.
Parameter
Range
Default Value
Notes
1
Run Mode
bit setting
0004H
See Figure 2
2
Drive RUN Command
bit setting
4000H
See Figure 3
3
Positive Torque Limit
0~±32767
-30000
1=0.01%
4
Negative Torque Limit
0~±32767
30000
1=0.01%
5
Positive Speed Limiter
0~32767
15000
1=0.01%
6
Negative Speed Limiter
0~32767
15000
1=0.01%
7
Zero Point Offset
0~±2
31
-1
0
1=1 command unit
8
Output Set Value
0~±2
31
-1
0
1=1 pulse
9
Approach Speed
0~32767
0
1=0.01%
10
Creep Speed
0~32767
0
1=0.01%
11
Linear Acceleration Time
0~32767
0
1=1ms
12
Linear Deceleration Time
0~32767
0
1=1ms
13
Positioning Range
0~65535
10
1=1 pulse
14
Deviation Error Detection
0~65535
65535
1=1 pulse
15
Position Loop Gain
0~32767
400
1=0.1
16
Feed Forward Gain
0~200
0
1=0.01
17
Position Reference
0~±2
31
-1
0
1=1 command unit
18
Average Times
0~65535
0
1=1ms
19
Speed Reference
0~±32767
0
1=0.01%
20
Phase Compensation
0~±2
31
-1
0
1=1 pulse
21
Speed Compensation
0~±32767
0
1=0.01%
22
Proportional Gain
0~32767
300
1=0.1
23
Integration Time
0~32767
300
1=1ms
24
Torque Reference
0~±32767
0
1=0.01%
25
Speed Limit
0~±32767
15000
1=0.01%
26
Speed Loop Gain
0~32767
400
1=0.1 Hz
27
Supplement Pulse
0~±2
31
-1
0
1=1 pulse
28
Servo Interface Command Type
Command
Selection
No
command
See Table 8
29
Servo Command Flag
Bit setting
0000H
See Figure 4
30
Fast Feed Speed
0~±2
31
-1
0
1=10 command
units/min
31
External Positioning Range
0~±2
31
-1
0
1=1 command unit
32
Stopping Distance
0~±2
31
-1
0
1=1 command unit