Yaskawa MP940 Reference Manual User Manual
Page 133
Mechatrolink Function
MotionSuite™ MP940 Machine Controller Reference Manual
4-42
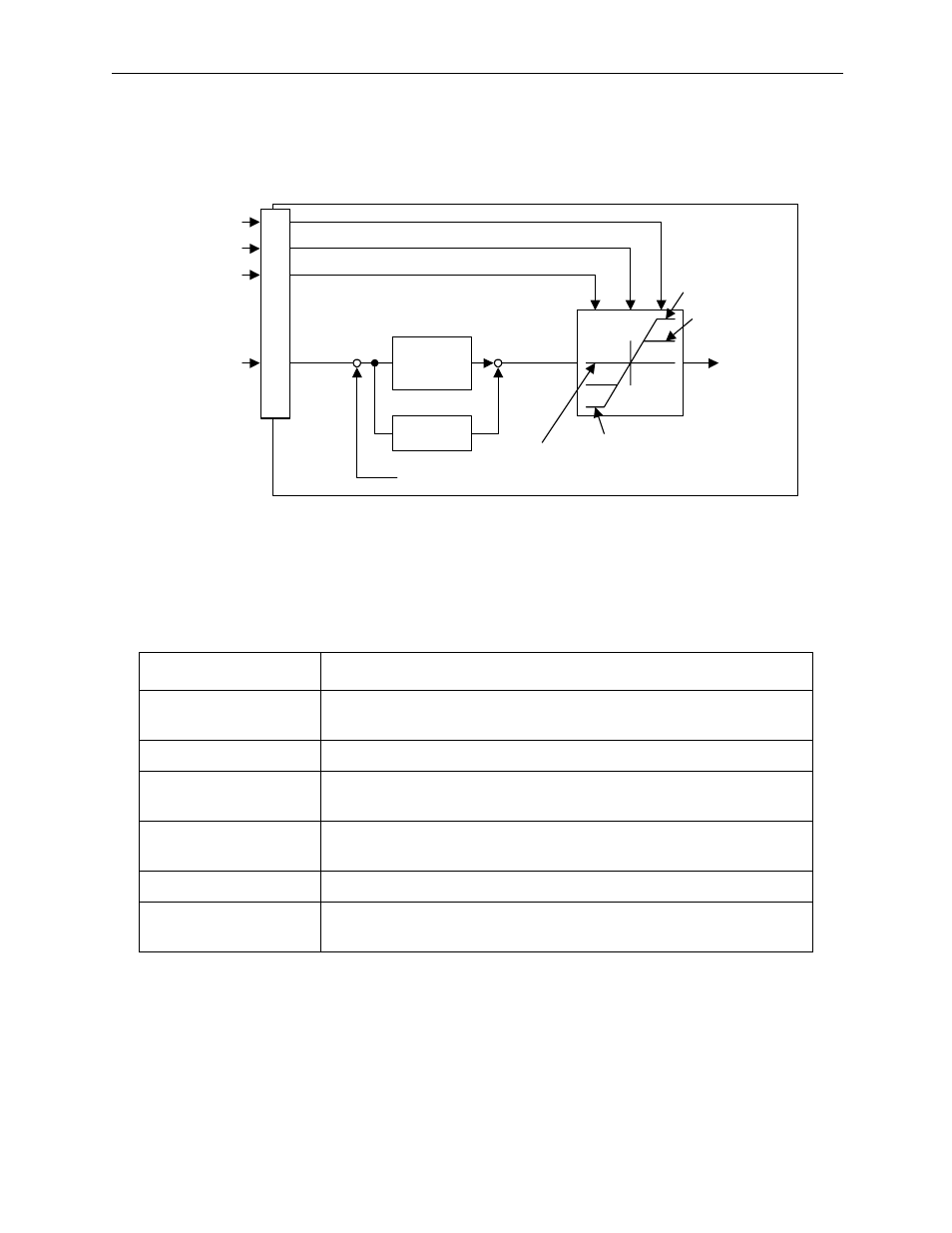
4. Designating a Desired Torque.
Torque limit control is possible according to the motion parameter setting
during speed reference, position control, and phase control.
5. The monitor data of the servo amplifier (SGDH) can be referenced at
high speed. The following parameters can be referenced from the lad-
der or motion program.
Ladder/Motion Program Referenced Parameters
Monitor Data
Reference Method
Feedback Position
Motion Monitor Parameter Machine Coordinate Feedback Position
(ILC008).
Position Deviation
Motion Monitor Parameter Position Offset (ILC00A)
Command Position
Motion Monitor Parameter Machine Coordinate Command Position
(ILC002)
Reference Speed
Motion Monitor Parameter Speed Reference Output Monitor
(IWLC00C).
Motor Speed
Motion Monitor Parameter Speed Monitor (IWLC00D).
External Encoder Count
CNTR I/O Data Setting Current Hardware Value (IL0004)
Current Counter Value (IL0010)
Pn402
Pn404
Pn403
(/P-CL:ON)
Pn405
(/N-CL:ON)
Torque Limit
Torque Limit
Speed Loop
Gain
(Pn100)
Integral
(Pn101)
+
+
+
Speed Feedback
-
Global Memory
/P-CL
(OBC0013)
/N-CL
(OBC0014)
Torque Limit
(OWC002)
Speed
Reference
(individual
control loop
output)