Ladder program example – Yaskawa MP940 Reference Manual User Manual
Page 419
Control Mode
MotionSuite™ MP940 Machine Controller Reference Manual
11-22
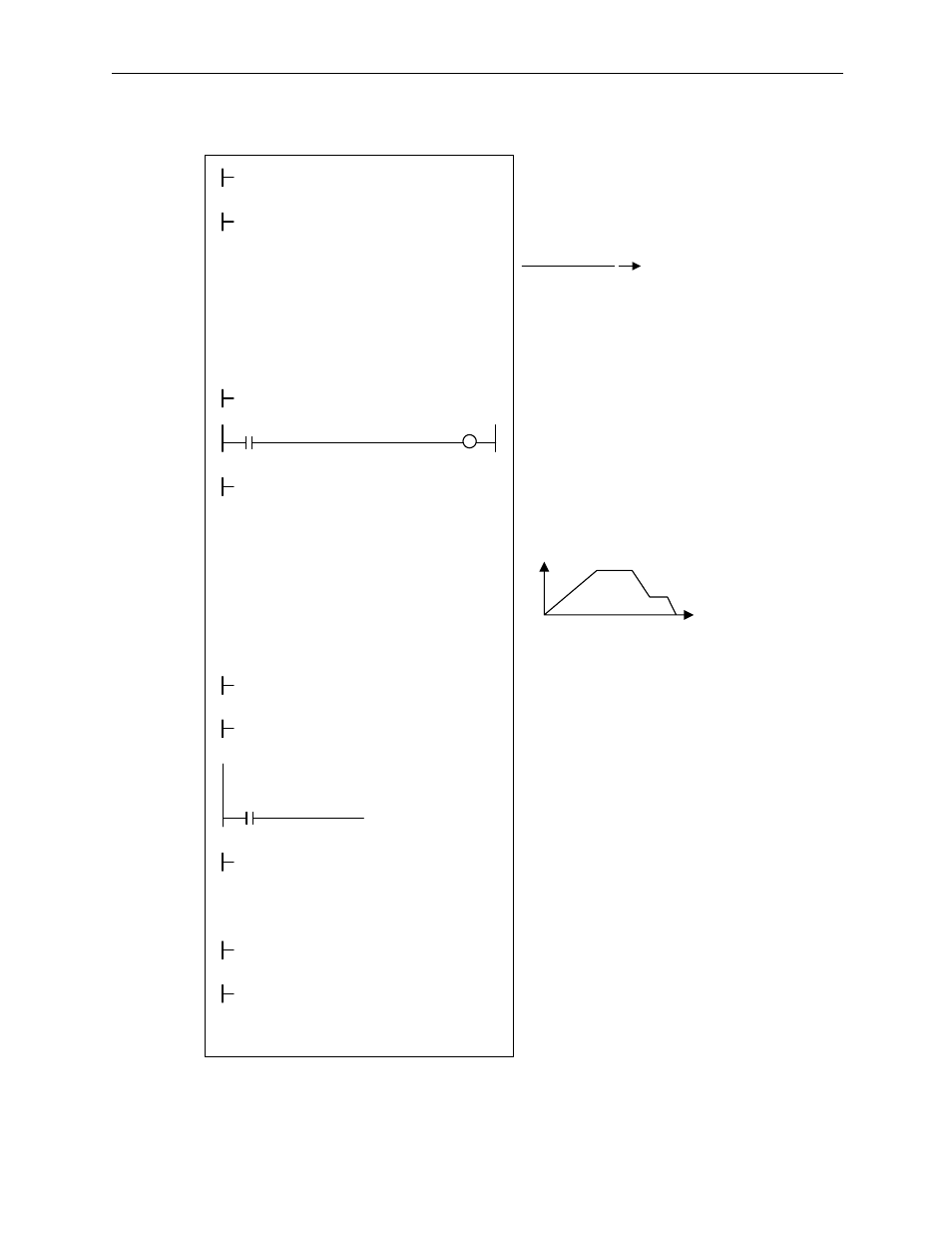
Ladder Program Example
H0188
RUNMOD
⇒ OWC000
Position Control Mode ON
Disable Phase Reference Generator
Calculation ON
MW00040×SW00004
K1
TsH
÷MW00041
K2
KS
⇒ ML03010
Calculates the speed scaling parameter
(ks)
Speed Scan Setting: SW0004
NR×FBppr×n Numerator
∗
MW00040
60×10
4
Denominator
∗
MW00041
NR= Rated Speed
FBppr= No. of Feedback Pulses`
n=Pulse Multiplication (1, 2, or 4)
*keep this to one word.
10000
FFGAIN
⇒ MW03012
RUN
OBC0010
PREPARE
MB010010
Phase Reference
ML03030
Displacement
Pattern
MA03050
FGN
Displacement X
⇒ ML03020
Feed Forward Gain (100000/100%)
Run Command to driver (RUN)
Phase control starts when MB010010 is
ON.
Displacement (pulses) from phase
reference read out from FG function.
The FGN pattern is set beforehand.
Displacement x
Position
Reference
ML03020
Variation
⇒ ML03022
Displacement X
Rotation
Position
-ML03024
00000
MB010020
RUN Command
[ ML03022]×MW03012
Variation
FFGAIN
÷ML03010
KS
NREF
⇒ OWC015
[ ML03022][+MW03020]
PHBIAS
[⇒ OLC016]
Position
BIAS
Displacement X
ML03020
Rotation
Position
⇒ ML03024
Displacement X
DEND
Variation perscan (pulses).
Operation occurs at the base speed
NREF when the run command
MB010020 is ON. When OFF, the base
speed NREF becomes 0.
Base Speed Reference Setting (0.01%)
Phase Compensation Setting (pulses)
Previous phase reference deviation
(pulsers)