Monitor parameter details, Number 1 - run status (runsts) – Yaskawa MP940 Reference Manual User Manual
Page 244
Parameter Details
MotionSuite™ MP940 Machine Controller Reference Manual
6-44
Monitor Parameter Details
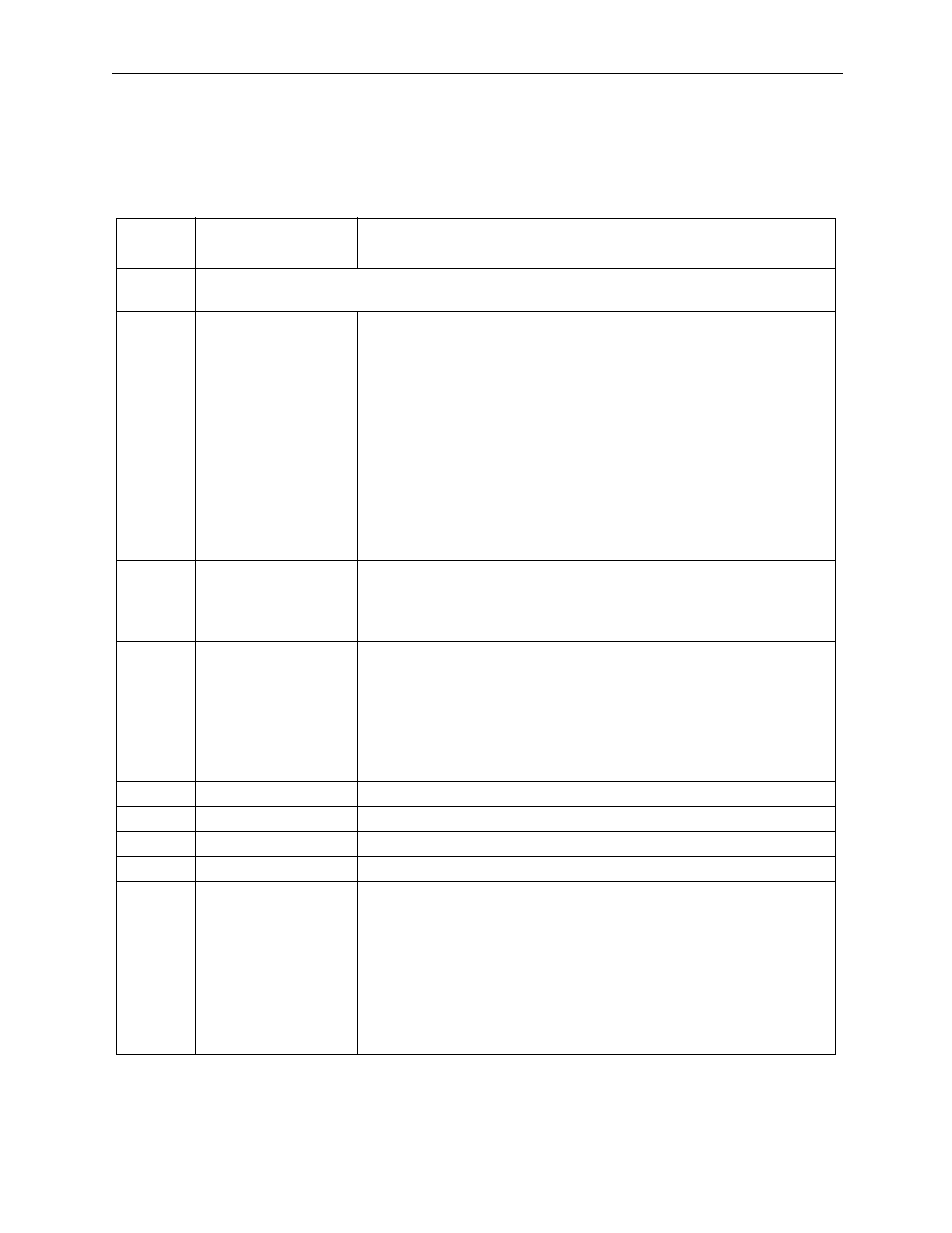
Number 1 - Run Status (RUNSTS)
Register
Number
Bit Name
Content
IWC000
Messages the run status of the MP940 Module.
The bit structure is shown below.
Bit 0
Deviation Error
(EOVER)
This bit is ON when the position deviation (ILC00A) exceeds the
Deviation Error Detection Setting (OWC00F).
Note: Because control continues in its current state, create a user
program to execute a different process by observing this bit when
processing is necessary in response to such applications as emer-
gency stop.
The following items may cause offset errors.
The Deviation Detection Value Setting (OWC00F) is too small.
Motor does not turn.
Motion is not done as per command because the machine load is
too heavy.
Enabled in the position control mode, zero-point return mode, or
phase control mode.
Bit 1
Setup Parameter Set-
ting Error (PRMERR)
This bit goes ON when the setting range is exceeded in the setup
parameter (OWC000~OWC03F).
The parameters with the most recent setting range errors are mes-
saged to Over Parameter No. (IWC00F).
Bit 2
Fixed Parameter
Setting Error (FPRM-
ERR)
This bit is ON when the setting of a fixed parameter exceeds the set-
ting range.
The most recent fixed parameter in which a setting range error has
occurred has 100 added, and is messaged to the Over Range
Parameter No. (IWC00F).
This bit automatically goes OFF when a normal fixed parameter is
set from MotionWorks
TM
.
Bit 3
Unused
—
Bit 4
Unused
—
Bit 5
Unused
—
Bit 6
Unused
—
Bit 7
Motion
Controller Run Prepa-
ration Complete
(SVCRDY)
ON when motion module run preparations are complete.
The following are possible reasons for the run preparation not com-
pleting.
Major Fault
Axis not selected for use (fixed parameter setting)
Fixed parameter setting error
Cumulative Turns Reception Error
Fixed parameter change underway
Absolute position readout underway from absolute encoder