Yaskawa MP940 Reference Manual User Manual
Page 452
MotionSuite™ MP940 Machine Controller Reference Manual
Position Control by Motion Commands
11-55
d. Command Abort
Turns the ABORT command (bit 1 of OWC021) ON or sets NOP (= 0)
into the motion commands.
BUSY (bit 0 of IWC0150) will go ON during abort processing, and OFF
at abort completion.
Note:
The following results upon release of ABORT (ABORT OFF) at
abort completion.
• Positioning will restart in the direction of the position reference
(OLC012) when the position reference type (bit 14 of OWC001) is
“absolute position type (= 0)”.
• The axis will remain stopped until a new position reference
(OLC012) is set when the position reference type (bit 14 of
OWC001) is “incremental addition type (= 1)”.
7. The positioning completion signal POSCOMP (bit D of IWC000) is
ON upon entering the positioning completion range (OWC00E) fol-
lowing feed completion (bit 2 of IWC015 is ON).
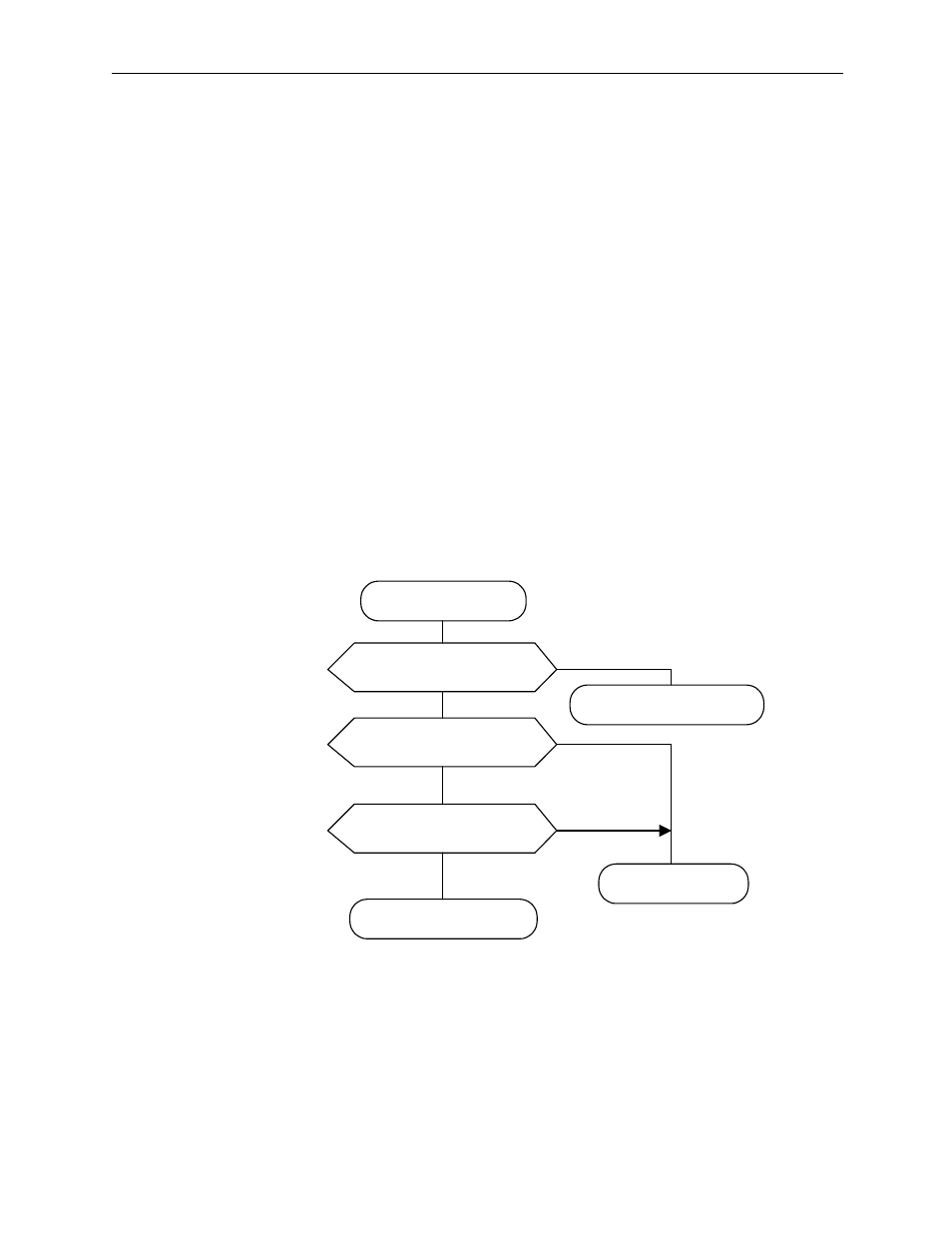
POSING
Completion Position Check
Motion Command Response
=POSING?
Motion Command Status
DEN=ON?
Run Status
POSCOMP=ON?
return(POSING Completion)
return (during execution of other
motion command)
return(during POSING)
YES
YES
YES
NO
NO
NO