Yaskawa MP940 Reference Manual User Manual
Page 444
MotionSuite™ MP940 Machine Controller Reference Manual
Position Control
11-47
There are three methods for setting the parameters:
• Setting by the MotionWorks
TM
“Setting Parameter Screen”
• Setting by ladder program
• Setting by motion program
Note: This parameter is only enabled in SVA-02 modules.
2. Select the position control mode (PCON) (Bit 2 of OWC000).
3. Run start for position control mode (not using motion commands).
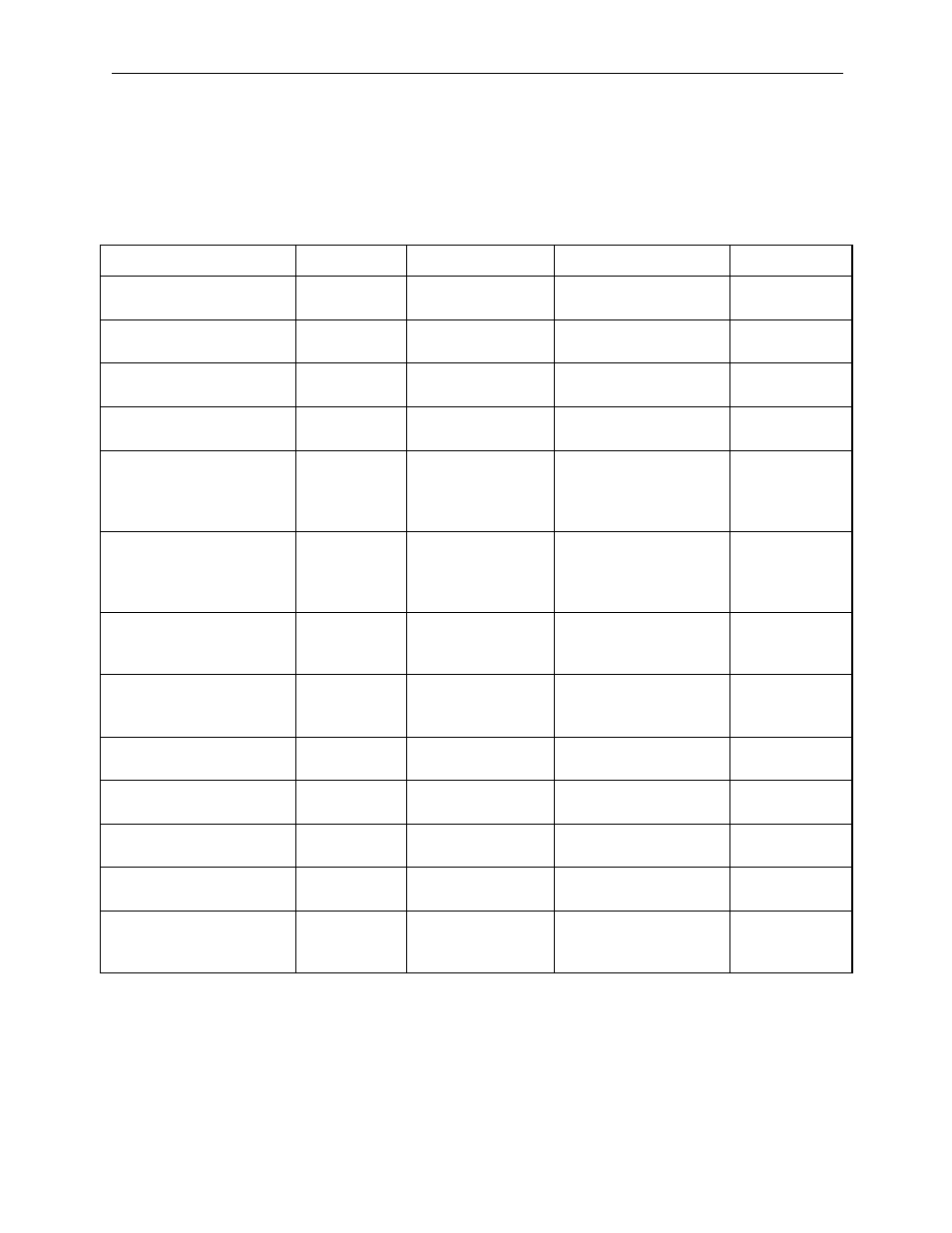
Name
Register No.
Setting Range
Meaning
Setting Example
Forward Torque Limit
(TLIMP)*
OWC002
-327.68 ~ 327.67
0.01 = 0.01
%1 = 1%
-100.00
(-100.00%)
Positive Speed Limiter
(NLIMP)
OWC004
0.00 ~ 327.67%
0.01 = 0.01
%1 = 1%
130.00
(130.00%)
Negative Speed Limiter
(NLIMN)
OWC005
0.00 ~ 327.67%
0.01 = 0.01
%1 = 1%
130.00
(130.00%)
Zero-point Position Offset
(ABSOFF)
OLC006
-2
31
~ 2
31
-1
1 = 1 command unit
During pulse 1 = 1 pulse
100 pulses
Linear Acceleration Time
(NACC)
OWC00C
0 ~ 32767
Linear acceleration time
constant at speed
parameter generation
(ms)
1000
(1s)
Linear Deceleration Time
(NDEC)
OWC00D
0 ~ 32767
Linear deceleration time
constant at speed
parameter generation
(ms)
1000
(1s)
Positioning Completion
Range Setting
(PEXT)
OWC00E
0 ~ 65535
1 = 1 command unit
During pulse 1 = 1 pulse
10 pulses
Deviation Error Detection
Setting
(EOV)
OWC00F
0 ~ 32767
1 = 1 command unit
During pulse 1 = 1 pulse
65535 pulses
Position Loop Gain Setting
(KP)
OWC010
0.0 ~ 3276.7
0.1 = 0.1/s
1 = 1/s
30.0
(30.0/s)
Filter Time Constant
(NNUM)
OWC014
0 ~ 255
For simple S-curve
accel/decel
0
Feed-forward Gain Setting
(Kf)
OWC011
0 ~ 200
1 = 1%
0
Position Reference Setting
(XREF)
OLC012
-2
31
~ 2
31-1
1 = 1 command unit
If Pulse: 1 = 1 pulse
10000 pulses
Speed Reference
(NREF)
OWC015
-327.68 ~ 327.67
Speed Reference
0.01 = 0.01
%1 = 1%
50.00
(50.00%)