Control mode, Outline of control modes, Speed control mode – Yaskawa MP940 Reference Manual User Manual
Page 403: Outline
Control Mode
MotionSuite™ MP940 Machine Controller Reference Manual
11-6
Control Mode
This section provides details on the motion control modes used in the MP940.
Outline of Control Modes
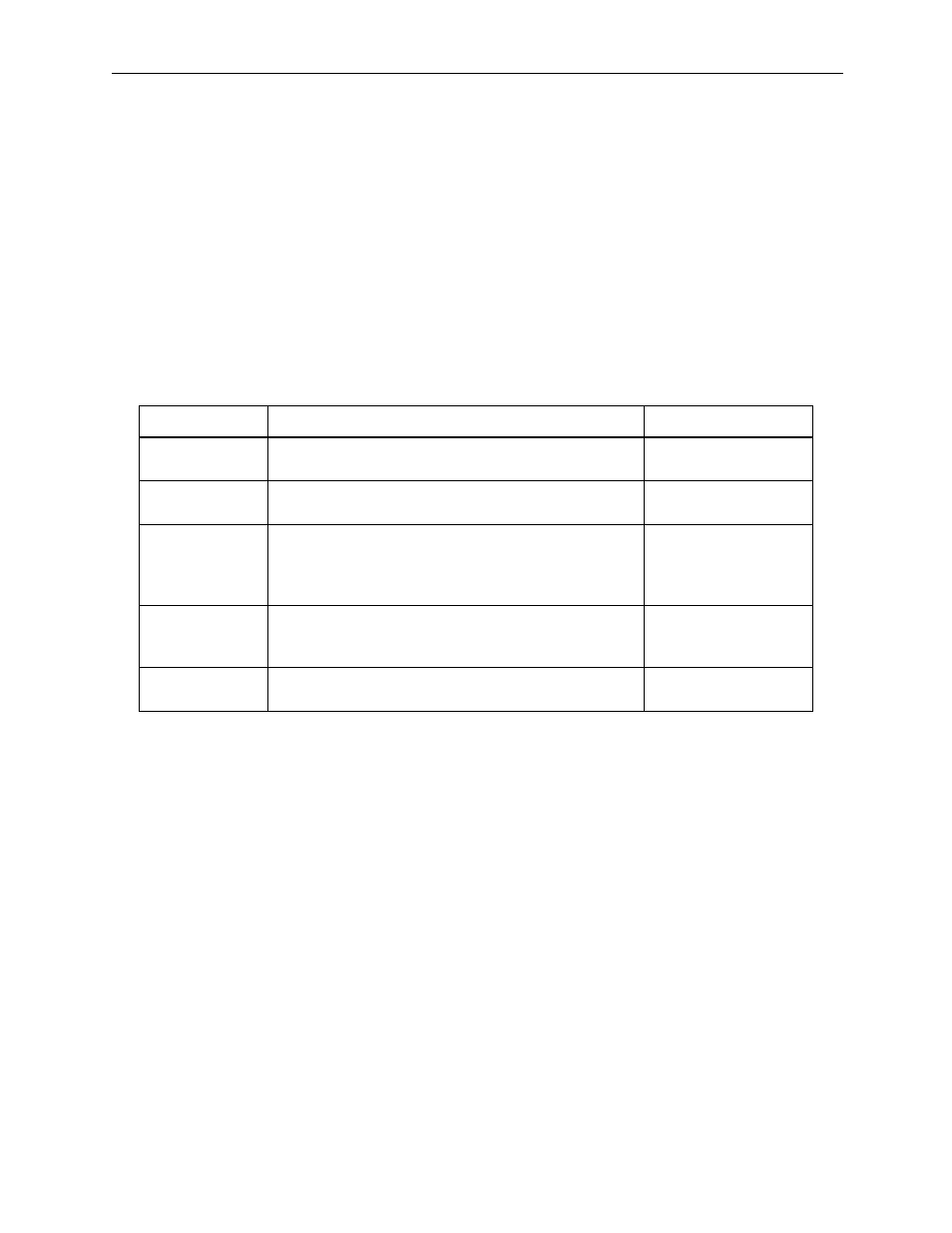
There are five control modes in the MP940 motion module which can be
switched in real time according to the application. The control mode types,
an outline thereof, and an application example, are shown in the following
table.
There are two methods of zero-point return operation: using the zero-return
mode, and using the zero-point return commands for position control.
Speed Control Mode
Outline
• Used for turning a motor at a desired speed.
• Outputs the speed reference to a servo amplifier according to a des-
ignated speed reference, linear accel/decel time constant, and filter
time constant.
• The accel/decel time may be set to any desired value.
• S-curve accel/decel can be easily achieved in user programs (one
command).
Control Mode
Summary
Application Example
Speed Control
Mode
Turns the motor at a designated speed.
Conveyors, Spindles
Torque Control
Mode
Outputs a designated torque.
Extrusion forming
machines, presses
Position Control
Mode*
Designate a target position and a speed.This creates
a position loop, measures deviation from the target
position from the encoder, converts this to a speed
reference, and executes position control.
Conveyor, XY Table
Phase Control
Mode
Executes phase control by creating a target position
from the speed reference while executing speed con-
trol according to the basic speed reference.
Electronic Camming,
Electronic Shaft
Zero-point
Return Mode*
Matches the axis to the zero-point position during
incremental encoder use.
—