Gain related parameters (continued) – Yaskawa MP940 Reference Manual User Manual
Page 272
SGDH User Parameters
MotionSuite™ MP940 Machine Controller Reference Manual
6-72
Pn111
Speed Feedback
Compensation*2
%1 ~ 500
The speed feedback compensation func-
tion is used to shorten the positioning set-
tling
time.
Adjustment Method
When adding speed feedback compensa-
tion, be sure to adjust the servo gain while
observing the position deviation and
torque reference using the analog moni-
tor.The adjustment procedure is shown
below.
The online auto-tuning function is unused if
user parameter Pn110 is set to 0002.
Adjust using the normal servo gain adjust-
ment procedure without feedback compen-
sation.The value of the speed loop integral
time constant (Pn101) becomes smaller as
the speed loop gain (Pn100) gradually
rises. At this time, the values of the speed
loop gain (Pn100) and the position loop
gain (Pn102) are made equal.
The relationship between the speed loop
gain and the integral time constant is as
follows:
Use the value obtained in the following for-
mula as the scale for the speed loop inte-
gral time constant (Pn101) setting.
100
Speed
Position
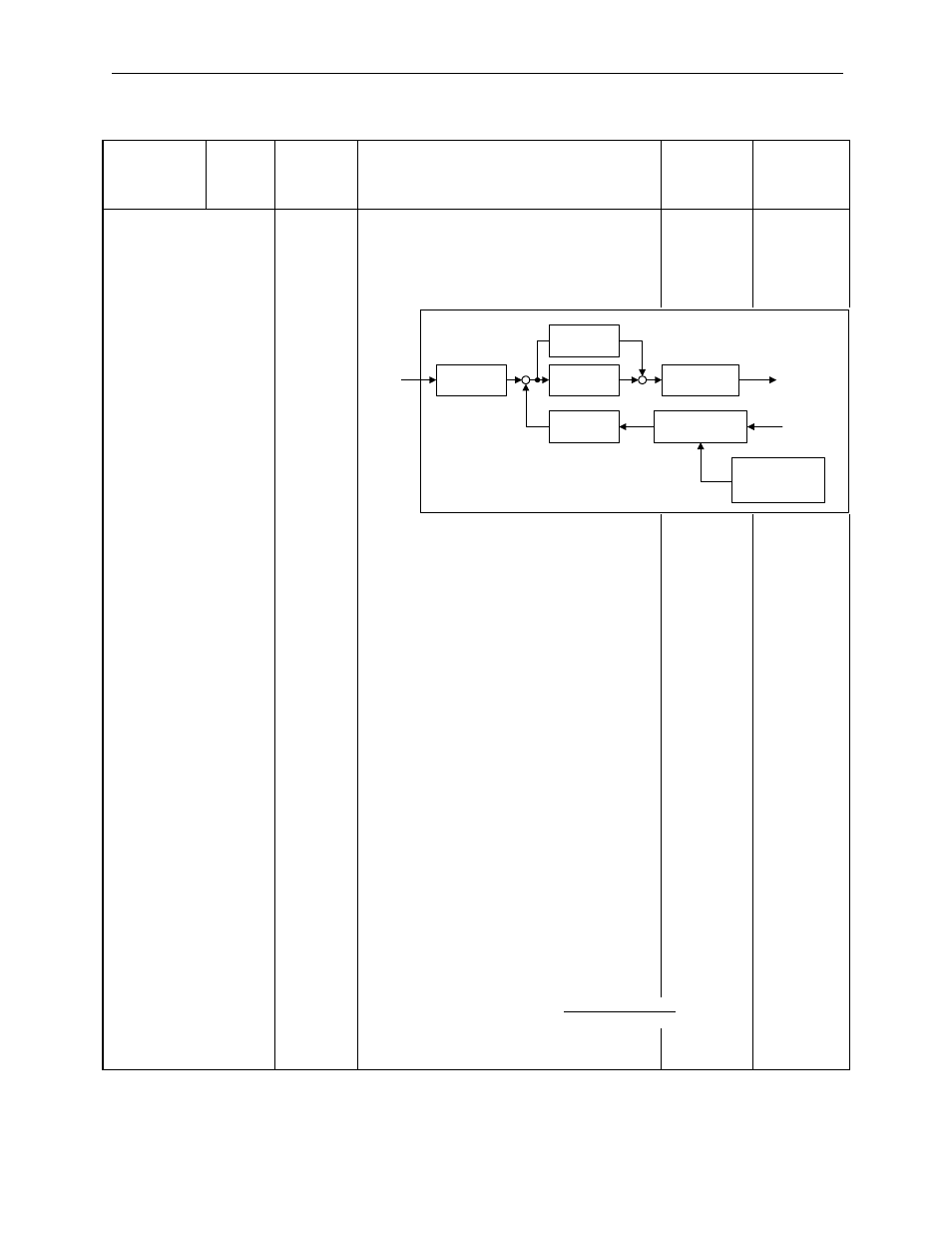
Gain Related Parameters (Continued)
User
Parameter
Number
Digital
Position
Name
(setting
range)
Content
Default
Setting
Control
Mode
Deviation
Counter
Output
Position Loop
Gain
(Pn102)
Integral
(Pn101)
Speed Loop Gain
(Pn100)
Speed FB Filter
(Pn308)
Torque Reference
FIlter
(Pn401)
Torque
Reference
Speed Feedback
Speed Feedback
Compensation
(Pn111)
Speed Feedback
Compensation Function
Selection
(Pn110.1)
+
-
+
+
Speed loop integral time constant =
4
2
π Speed loop gain
seconds