Yaskawa MP940 Reference Manual User Manual
Page 252
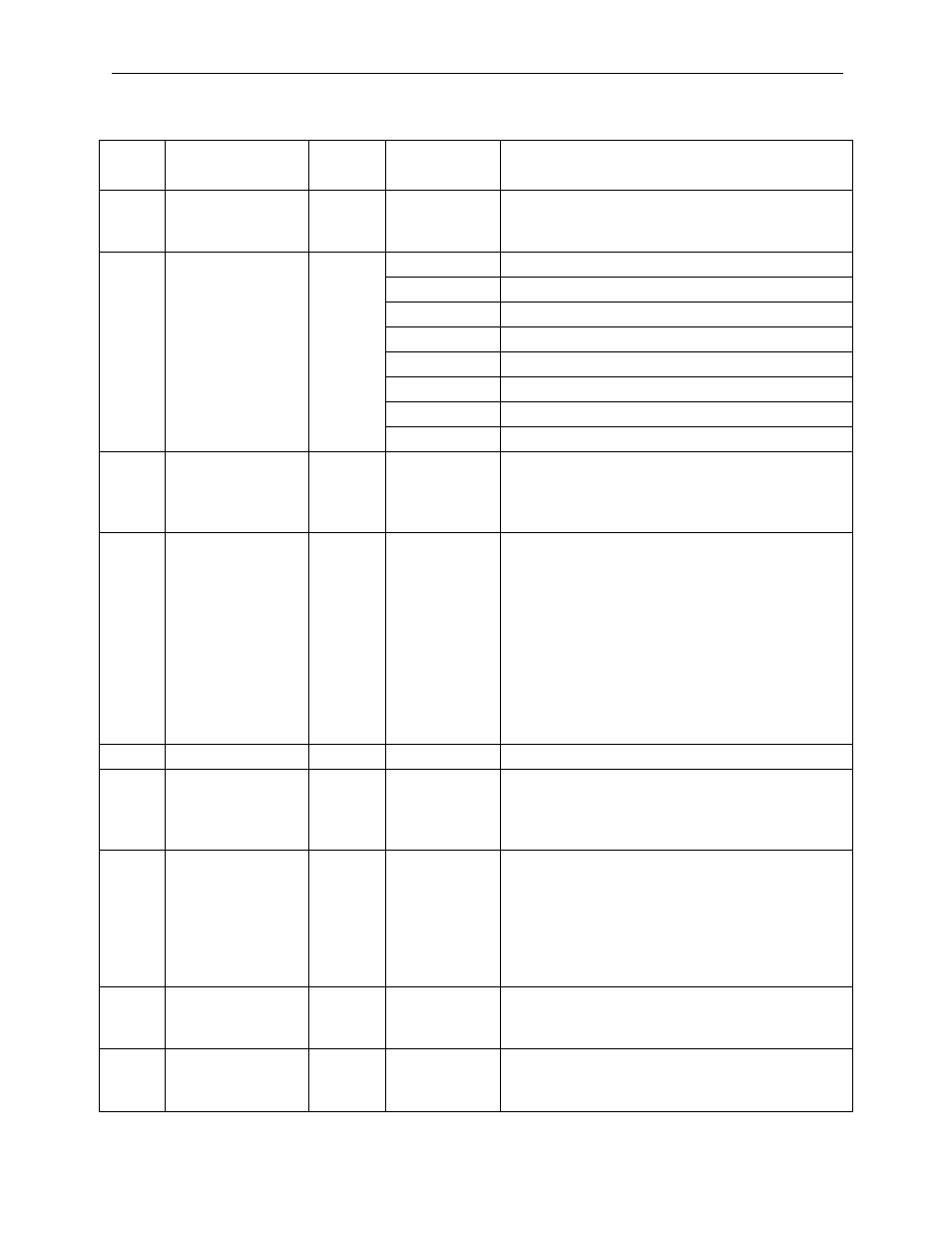
Parameter Details
MotionSuite™ MP940 Machine Controller Reference Manual
6-52
37
Network Servo
Alarm Code
IWC024
-32768 ~
32767
Messages the code of the alarm currently occur-
ring in the servo amplifier.
38
Network Servo I/O
Monitor
IWC025
Bit 0: SIO
General-use Input Signal
Bit 1: DEC
Deceleration Dog-leg Switch
Bit 2:P-OT
Forward Limit Switch Input
Bit 3:N-OT
Reverse Limit Switch Input
Bit 4:EXT1
External Input Signal 1
Bit 5:EXT2
External Input Signal 2
Bit 6:EXT3
External Input Signal 3
Bit 7:~15F
Unused
39
Speed Reference
Output Value
ILC026
-2
31
~ 2
31-1
Messages the feed amount at each scan. 0 when
machine lock (IBC0170 is ON). Enabled when a
motion command (OWC020) is used in the posi-
tion control mode.
41
Position Buffer
Data
ILC028
-2
31
~ 2
31-1
Reads out the position data designated in the
Position Buffer Access Number (OLC038), and
stores it in this register when the motion setting
parameter “Position Buffer Readout (OBC021F)”
is ON.
Be aware that 2 scans are required from the time
that the position buffer read-out command
(OBC021F) goes ON until the data is stored in this
register.
Enabled when a motion command (OWC020) is
used in the position control mode.
43
Unused
IlC02A
—
—
45
Integral Output
Value
ILC02C
-2
31
~ 2
31-1
Messages the integral output when a position loop
is used in PI control (see bit 8 of OWC021).
Enabled in position control mode or zero-point
return mode.
47
Reference Coordi-
nate Calculation
Position
ILC02E
-2
31
~ 2
31-1
This is significant when a rotary axis (= 1) is
selected for the fixed motion parameter “Axis
Selection” (bit 5 of the motion controller function
selection flag).It messages the target position at
each scan of the rotary axis. Enabled when a
motion command (OWC020) is used in the posi-
tion control mode.
49
First Order Lag
ILC030
-2
31
~ 2
31-1
Messages (PI Output - One-time Lag Output).
Enabled in position control mode or zero-point
return mode.
51
Position Loop Out-
put Value
ILC032
-2
31
~ 2
31-1
Messages the position loop output (value prior to
addition of feed-forward operation). Enabled in
position control mode or zero-point return mode.
Other Monitor Parameters (Continued)
Number
Name
Register
Number
Bit Name
Content