Yaskawa MP940 Reference Manual User Manual
Page 472
MotionSuite™ MP940 Machine Controller Reference Manual
Zero-point Return (ZRET)
11-75
The axis remains stopped even if ABORT is released (ABORT OFF) at
abort completion.
e. Decelerates to approach speed at the downward transfer of the transi-
tion (deceleration LS) signal.
f. Decelerates to creep speed at the upward transfer of the transition
(deceleration LS) signal.
g. The axis moves from the initial zero-point signal (C-phase pulse) by
the final zero-point return run distance (OLC02A) at the upward trans-
fer of the pulse transition, stops, then assumes that position as the
machine coordinate zero-point.
A zero-point offset can also be set (the position data will be 100 when
the zero-point position offset OLC006 is set to 100).
After feed completion (bit 2 of IWC015 is ON), the zero-point return
operation will be assumed to be finished when the axis enters the
positioning completion range (OWC00E). The zero-point return
completion statel ZRNC (Bit 6 of IWC015) goes ON upon completion of
the zero-point return operation.
The motion commands (OWC020) go to NOP (= 0) after it is recognized
that the zero-point return completion state ZRNC (bit 6 of IWC015) is
ON.
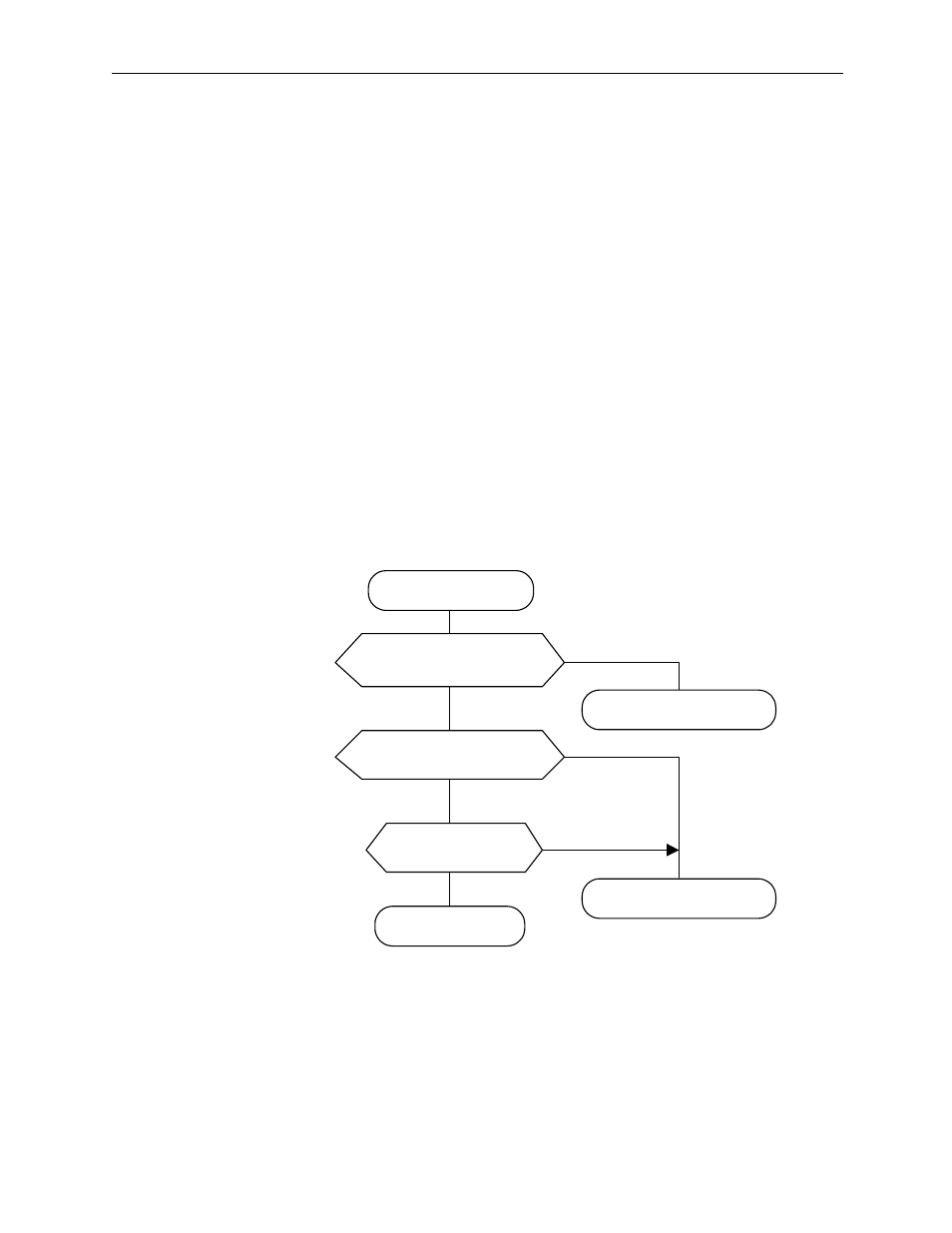
ZRET
Completion Condition Check
Motion Command Response =ZRET?
return (ZRET Complete
return (ZRET Running)
YES
YES
NO
NO
Run Status
ZRNC=ON?
YES
NO
Motion Command Response
BUSY=OFF?
return (Other motion command
running)