Details of setup parameters, Run mode setting (runmod) – Yaskawa MP940 Reference Manual User Manual
Page 218
Parameter Details
MotionSuite™ MP940 Machine Controller Reference Manual
6-18
Details of Setup Parameters
Supplemental Explanation
The order of priority in operation mode setting (OWC000), and run
commands (OWC001), is as follows:
When ON at the same time, control modes are executed in order of priority.
Operation differs according to the control mode when a RUN signal (Bit 0 of
OWC001) is turned OFF while running.
• When Selecting Position/Speed/Phase Control/Zero-point Return Modes
The RUN signal remains ON until the axis decelerates to stop according to
the linear deceleration parameter set from the current speed reference.
• If Torque Reference Output Mode
When the RUN signal is OFF, 0 is output immediately as a speed reference,
and outputs an OFF signal in the case of a servo amplifier.
Machine Coordinate Zero-point Position Offset Setting (ABSOFF). This data structures the
position control managed by the module. Erroneous settings in this register affect subse-
quent motion operations. Always ensure the data settings are correct prior to operation.
Failure to conduct these checks may result in tool damage and/or physical injury, due to
the intervention of the tool.
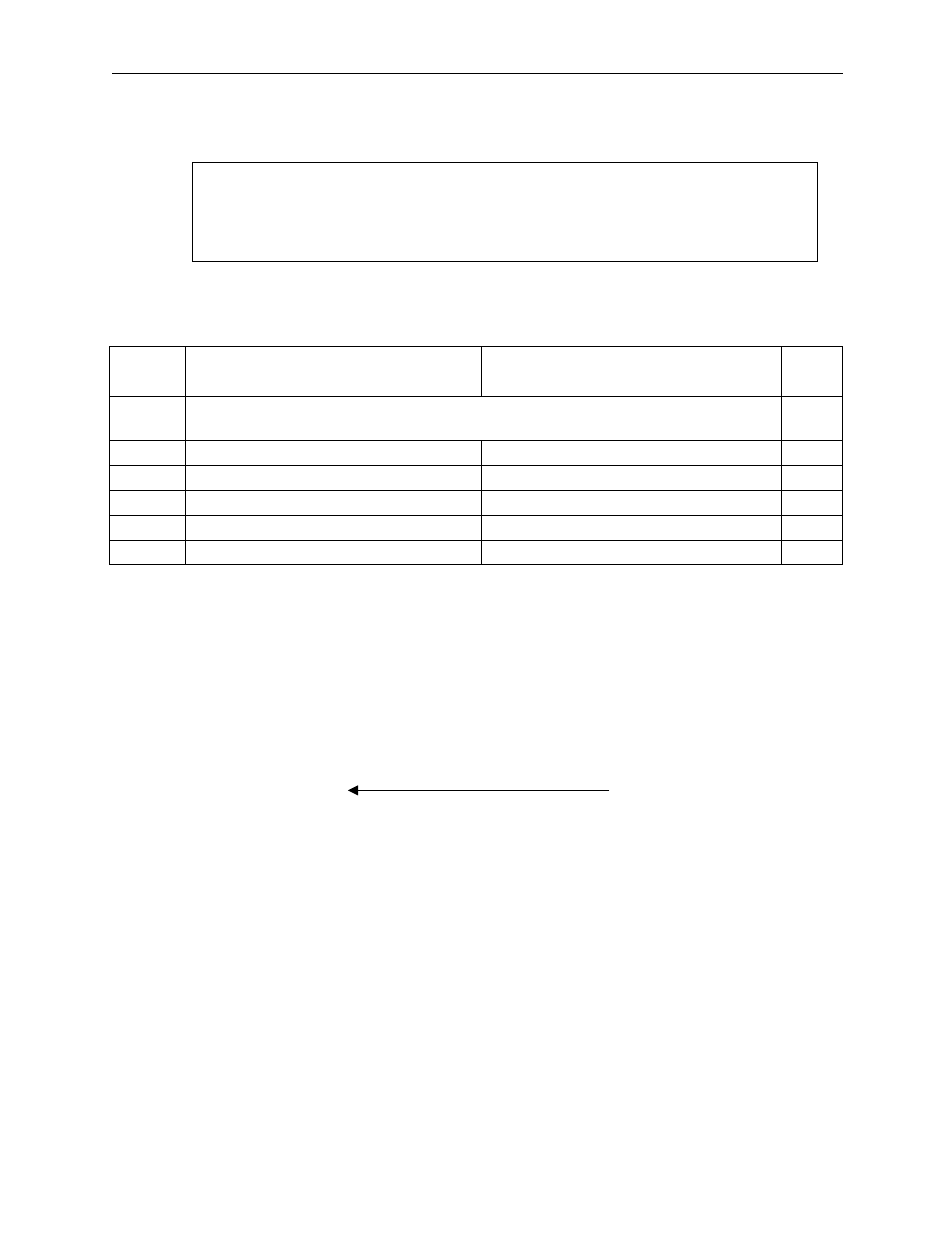
Run Mode Setting (RUNMOD)
Register
Number
Bit Name
Content
Default
Value
OWC000 Sets control modes and operation modes such as alarm reset, etc. The bit structure is
shown below.
—
Bit 0
Speed Reference Output Mode (NCON)
Selects the speed reference output mode. 0
Bit 1
Torque Reference Output Mode (TCON)
Selects the torque reference output mode. 0
Bit 2
Position Control Mode (PCON)
Selects position control mode.
1
Bit 3
Phase Control Mode (PHCON)
Selects phase control mode.
0
Bit 4
Zero-point Return Mode (ZRN)
Selects the zero-point return mode.
0
RUN>ZRN>NCON>TCON>PCON>PHCON
(High)
Order of Priority
(Low)