Yaskawa MP940 Reference Manual User Manual
Page 466
MotionSuite™ MP940 Machine Controller Reference Manual
Zero-point Return (ZRET)
11-69
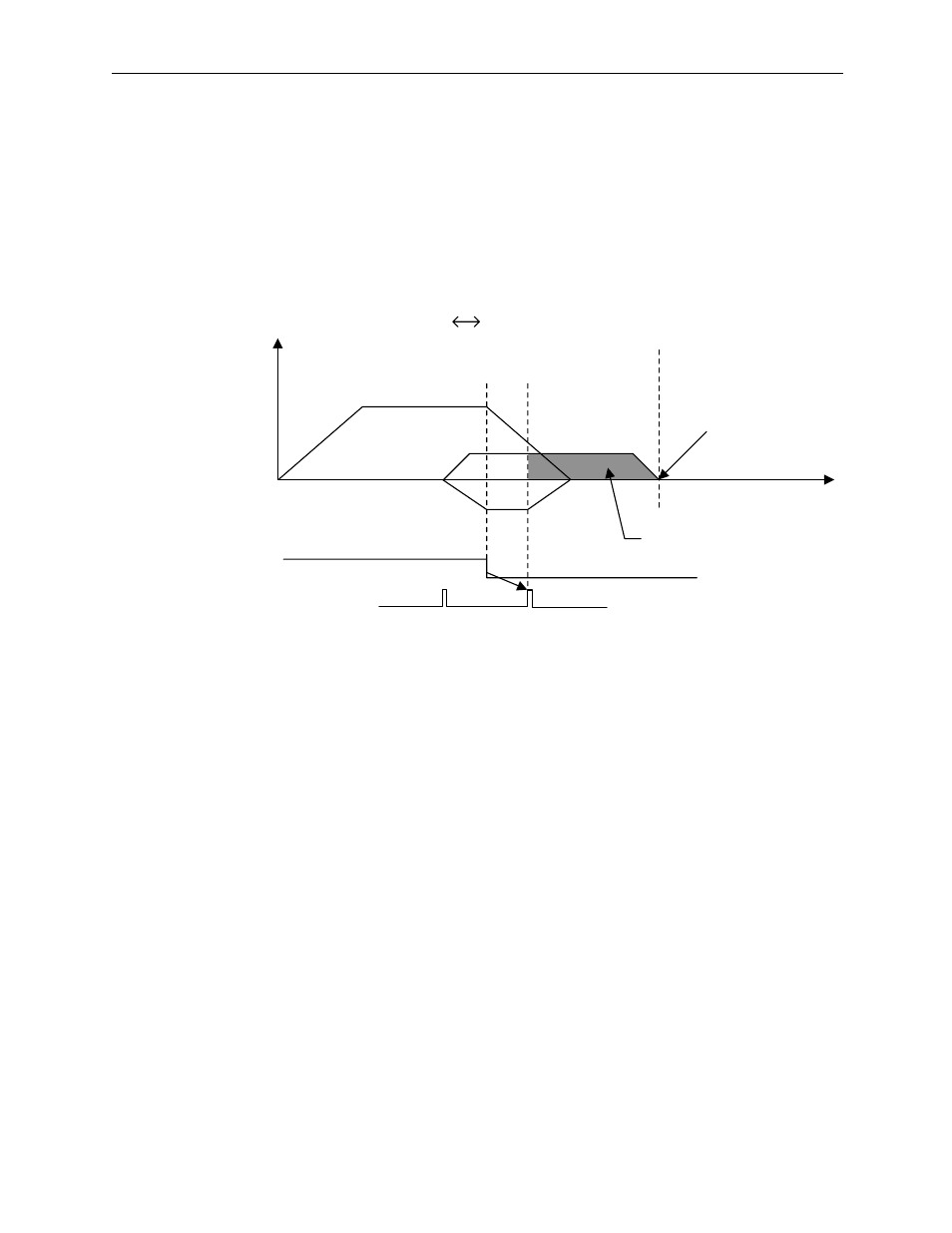
5. Moves in a forward direction at approach speed.
6. After detecting the downward transfer of the transition pulse (decelera-
tion LS), the axis moves from the initial zero-point signal by the final
zero-point return run distance (OLC02A) at the upward transfer of the
pulse transition, stops, then assumes that position as the machine coor-
dinate zero point.
Operation in Area (b) at Zero-point Return Operation Start
1. Moves in a reverse direction at approach speed.
2. Decelerates at the downward transfer of the zero-point return reverse
limit signal (LMT_L).
3. Moves in a positive direction at fast feed speed.
4. Decelerates at the downward transfer of the transition (deceleration LS)
signal.
5. Moves in a reverse direction at approach speed.
6. Decelerates at the upward transfer of the transition (deceleration LS)
signal.
7. Moves in a forward direction at approach speed.
8. After detecting the downward transfer of the transition pulse (decelera-
tion LS), the axis moves from the initial zero-point signal by the final
zero-point return run distance (OLC02A) at the upward transfer of the
pulse transition, stops, then assumes that position as the machine coor-
dinate zero-point.
Speed
Reference
0
Fast Feed
Speed
1.
Reverse Forward
Zero
Point
Creep Speed
Approach
Speed
Dog
Leg
(Deceleration LS)
Zero Point
Signal
(C-phase Pulse)
Time
2.
5.
4.
3.
6.
Zero-Point
Return
Zero Point Return
Final Run Distance