Gain related parameters (continued) – Yaskawa MP940 Reference Manual User Manual
Page 267
MotionSuite™ MP940 Machine Controller Reference Manual
SGDH User Parameters
6-67
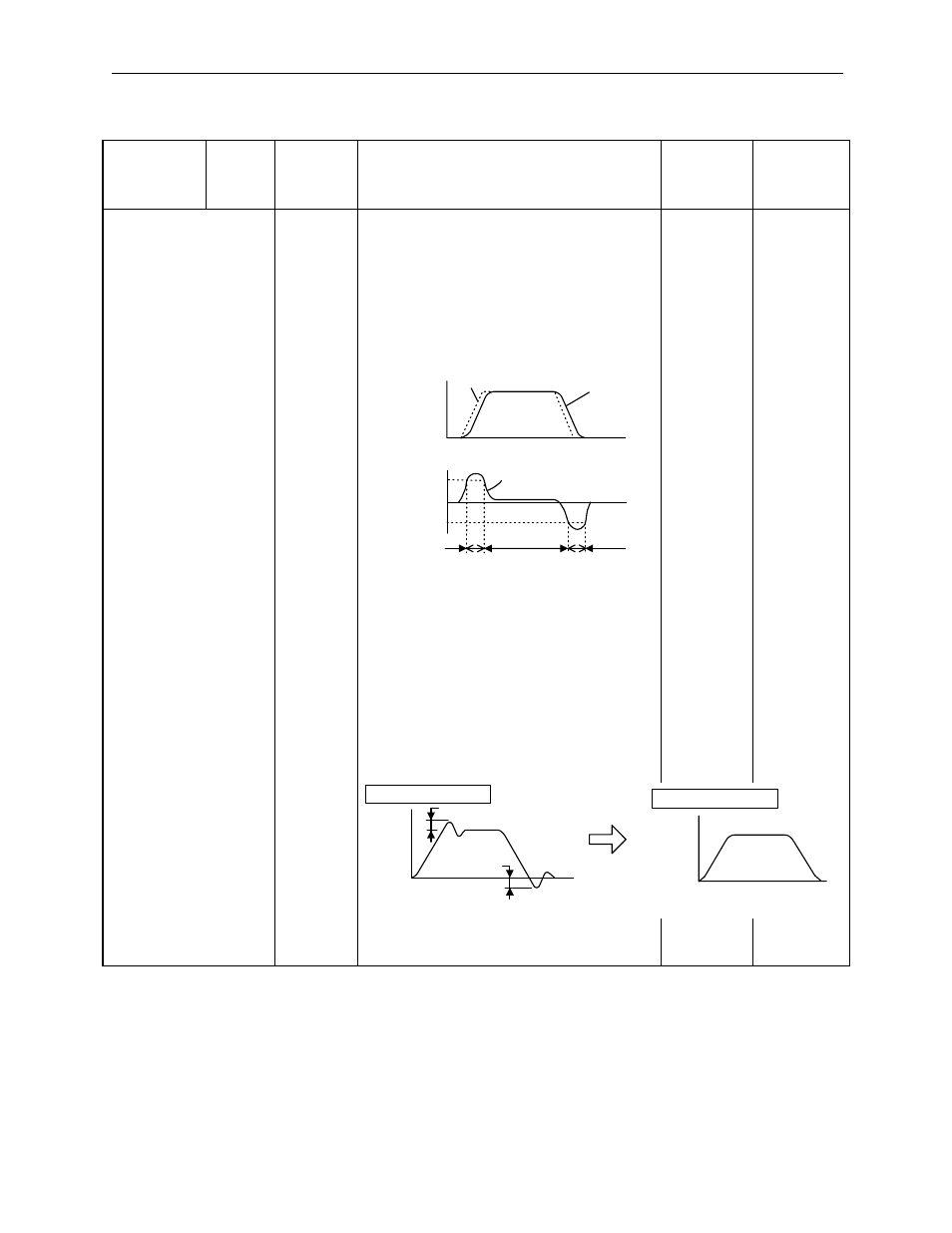
Pn10C
Mode Switch
(torque reference)
%
0 ~ 800
When Pn10B.0 = 0 assuming torque refer-
ence as the detection point, the speed loop
is in P control when the torque reference is
at or above the torque set in user parame-
ter Pn10C.
This mode is the standard factory setting
for the servo amplifier. (Pn10C = 200)
Usage Example
During accel/decel, torque saturation may
occur, resulting in motor speed
undershoot or overshoot when constant PI
control without the use of mode switches
is assumed. Supress torque saturation
and eliminate motor speed overshoot and
undershoot by using the mode switches.
200
Speed
Torque
Position
Gain Related Parameters (Continued)
User
Parameter
Number
Digital
Position
Name
(setting
range)
Content
Default
Setting
Control
Mode
Motor Speed
Reference
Speed
Speed
Internal Torque
Reference
PI Control
P Control
PI Control
P Control
+Pn10C
0 Torque
-Pn10C
PI Control
Overshoot
Undershoot
Motor
Speed
Time
No Mode Switches
w/ Mode Switches
Motor
Speed
Time