Detailed description – Yaskawa MP940 Reference Manual User Manual
Page 443
Position Control
MotionSuite™ MP940 Machine Controller Reference Manual
11-46
Position Control without the Use of Motion Commands
In accordance with the instructions in the related parameters, the system
executes speed accel/decel, and positions at the target location in the position
referetence setting parameter OLC012.
Detailed Description
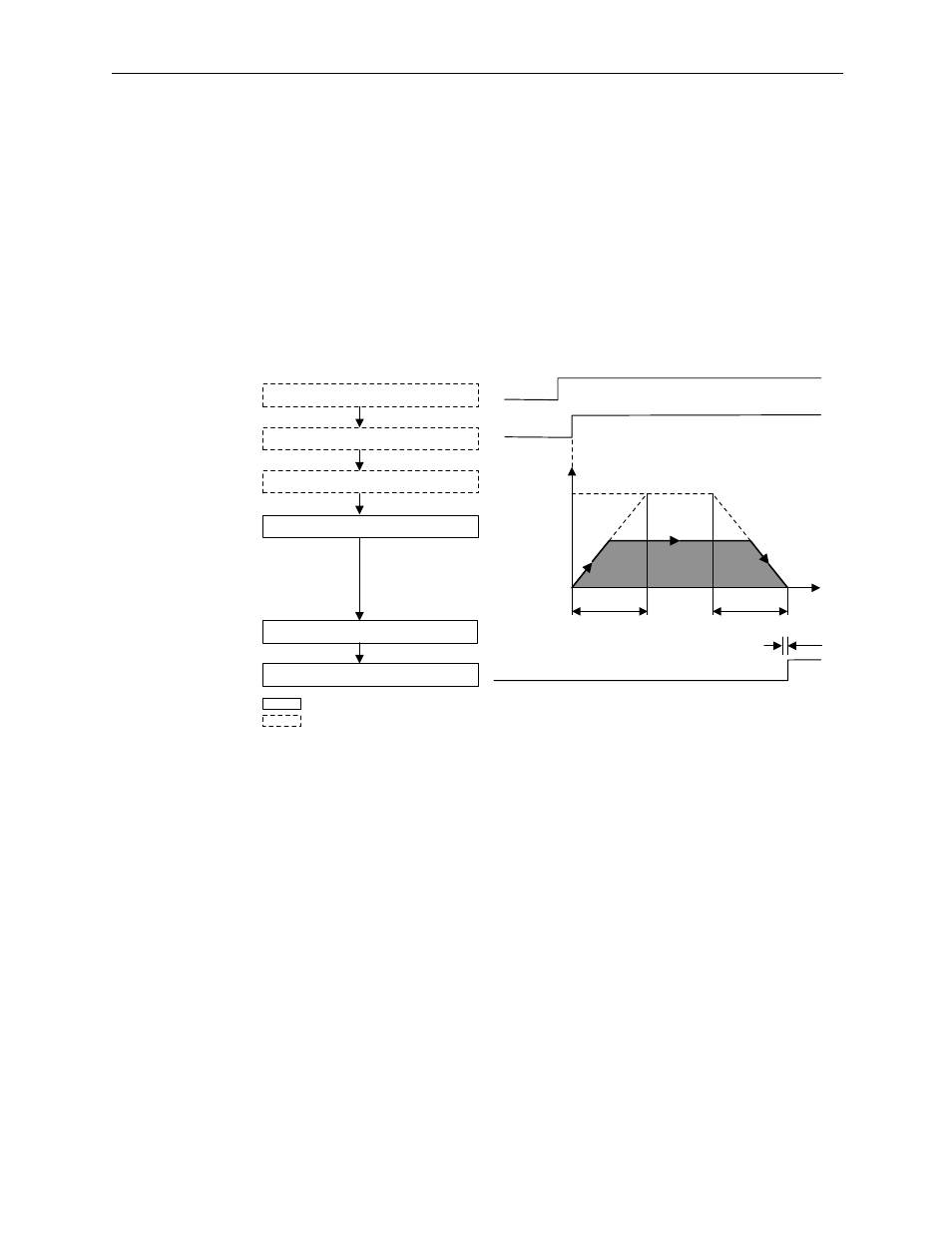
The run procedure for position control not using motion commands is
shown below.
1. Set the motion parameters used in the position control mode.
Position
Speed
(%)
(100%)
0
Time
(t)
Fixed
Motion
Speed
Linear Accel Time
Constant
Linear Decel Time
Constant
RUN
PCON
Signifies system execution.
POSCONP
Positioning Completion Range
Signifies user setting.
1. Setting of motion setup parameters
2. Setting of Position Control mode (PCON)
3. Start of Position Control Mode Operation
4. Closing of Position Control mode
Servo Clamp Status
Start of positioning operation